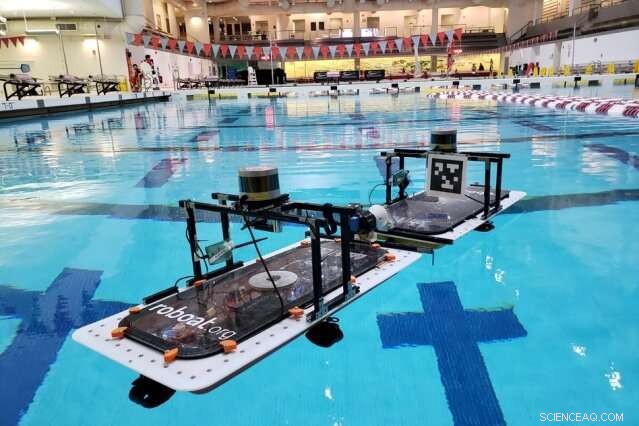
Los investigadores del MIT han dado a su flota de "roboats" autónomos la capacidad de apuntar y abrocharse automáticamente entre sí, y seguir intentándolo si fallan. Los roboats están diseñados para transportar personas, recoger basura y autoensamblar en estructuras flotantes en los canales de Amsterdam. Crédito:Instituto de Tecnología de Massachusetts
La ciudad de Ámsterdam prevé un futuro en el que flotas de barcos autónomos recorran sus numerosos canales para transportar mercancías y personas. recoger basura o autoensamblar en escenarios flotantes y puentes. Para promover esa visión, Los investigadores del MIT han dado nuevas capacidades a su flota de botes robóticos, que se están desarrollando como parte de un proyecto en curso, que les permite apuntar y abrocharse entre sí. y sigue intentándolo si fallan.
Aproximadamente una cuarta parte de la superficie de Ámsterdam es agua, con 165 canales serpenteantes a lo largo de las concurridas calles de la ciudad. Muchos años atrás, El MIT y el Instituto de Ámsterdam para Soluciones Metropolitanas Avanzadas (Instituto AMS) se unieron en el proyecto "Roboat". La idea es construir una flota de botes robóticos autónomos:cascos rectangulares equipados con sensores, propulsores, microcontroladores, Módulos GPS, cámaras, y otro hardware, que proporciona movilidad inteligente en el agua para aliviar la congestión en las concurridas calles de la ciudad.
Uno de los objetivos del proyecto es crear unidades de botes que proporcionen transporte bajo demanda en vías fluviales. Otro objetivo es usar las unidades de botes para formar automáticamente estructuras "emergentes", como puentes peatonales, etapas de actuación, o incluso mercados de alimentos. Las estructuras podrían entonces desmontarse automáticamente en momentos establecidos y reformarse en estructuras de destino para diferentes actividades. Adicionalmente, las unidades de bote rodante podrían usarse como sensores ágiles para recopilar datos sobre la infraestructura de la ciudad, y la calidad del aire y el agua, entre otras cosas.
En 2016, Los investigadores del MIT probaron un prototipo de bote que navegaba por los canales de Ámsterdam, avanzando, hacia atrás, y lateralmente a lo largo de un camino preprogramado. El año pasado, investigadores diseñados a bajo costo, Impreso en 3-D, versiones de un cuarto de escala de los barcos, que eran más eficientes y ágiles, y vino equipado con algoritmos avanzados de seguimiento de trayectoria.
En un artículo presentado en la Conferencia Internacional sobre Robótica y Automatización, los investigadores describen unidades de botes que ahora pueden identificar y conectarse a las estaciones de acoplamiento. Los algoritmos de control guían a los roboats al objetivo, donde se conectan automáticamente a un mecanismo de cierre personalizado con precisión milimétrica. Es más, el roboat se da cuenta de si ha perdido la conexión, hace copias de seguridad, y vuelve a intentarlo.
Los investigadores probaron la técnica de enganche en una piscina en el MIT y en el río Charles. donde las aguas son más turbulentas. En ambos casos, las unidades de roboat generalmente pudieron conectarse con éxito en unos 10 segundos, a partir de aproximadamente 1 metro de distancia, o lo lograron después de algunos intentos fallidos. En Amsterdam, el sistema podría ser especialmente útil para la recolección de basura durante la noche. Las unidades de botes pueden navegar alrededor de un canal, ubicar y sujetar plataformas que contengan contenedores de basura, y llévelos de regreso a las instalaciones de recolección.
"En Amsterdam, Los canales se usaban una vez para el transporte y otras cosas para las que ahora se usan las carreteras. Las carreteras cercanas a los canales ahora están muy congestionadas, y tienen ruido y contaminación, por lo que la ciudad quiere agregar más funcionalidad a los canales. "dice el primer autor Luis Mateos, estudiante de posgrado en el Departamento de Estudios Urbanos y Planificación (DUSP) e investigador del MIT Senseable City Lab. "Las tecnologías de conducción autónoma pueden ahorrar tiempo, costes y energía, y mejorar la ciudad en el futuro ".
"El objetivo es utilizar unidades de botes sin motor para dar vida a nuevas capacidades en el agua, "agrega la coautora Daniela Rus, director del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL) y el Profesor Andrew y Erna Viterbi de Ingeniería Eléctrica e Informática. "El nuevo mecanismo de enganche es muy importante para crear estructuras emergentes. Roboat no necesita enganche para el transporte autónomo en el agua, pero necesitas el pestillo para crear cualquier estructura, ya sea móvil o fijo ".
Junto a Mateos en el papel están:Wei Wang, a joint postdoc in CSAIL and the Senseable City Lab; Banti Gheneti, a graduate student in the Department of Electrical Engineering and Computer Science; Fabio Duarte, a DUSP and Senseable City Lab research scientist; and Carlo Ratti, director of the Senseable City Lab and a principal investigator and professor of the practice in DUSP.
Making the connection
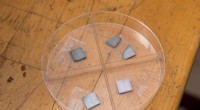
Each roboat is equipped with latching mechanisms, including ball and socket components, on its front, espalda, and sides. The ball component resembles a badminton shuttlecock—a cone-shaped, rubber body with a metal ball at the end. The socket component is a wide funnel that guides the ball component into a receptor. Inside the funnel, a laser beam acts like a security system that detects when the ball crosses into the receptor. That activates a mechanism with three arms that closes around and captures the ball, while also sending a feedback signal to both roboats that the connection is complete.
On the software side, the roboats run on custom computer vision and control techniques. Each roboat has a LIDAR system and camera, so they can autonomously move from point to point around the canals. Each docking station—typically an unmoving roboat—has a sheet of paper imprinted with an augmented reality tag, called an AprilTag, which resembles a simplified QR code. Commonly used for robotic applications, AprilTags enable robots to detect and compute their precise 3-D position and orientation relative to the tag.
Both the AprilTags and cameras are located in the same locations in center of the roboats. When a traveling roboat is roughly one or two meters away from the stationary AprilTag, the roboat calculates its position and orientation to the tag. Típicamente, this would generate a 3-D map for boat motion, including roll, terreno de juego, and yaw (left and right). But an algorithm strips away everything except yaw. This produces an easy-to-compute 2-D plane that measures the roboat camera's distance away and distance left and right of the tag. Using that information, the roboat steers itself toward the tag. By keeping the camera and tag perfectly aligned, the roboat is able to precisely connect.
The funnel compensates for any misalignment in the roboat's pitch (rocking up and down) and heave (vertical up and down), as canal waves are relatively small. Si, sin embargo, the roboat goes beyond its calculated distance, and doesn't receive a feedback signal from the laser beam, it knows it has missed. "In challenging waters, sometimes roboat units at the current one-quarter scale, are not strong enough to overcome wind gusts or heavy water currents, " Mateos says. "A logic component on the roboat says, "You missed, so back up, recalculate your position, and try again.""
Future iterations
The researchers are now designing roboat units roughly four times the size of the current iterations, so they'll be more stable on water. Mateos is also working on an update to the funnel that includes tentacle-like rubber grippers that tighten around the pin—like a squid grasping its prey. That could help give the roboat units more control when, decir, they're towing platforms or other roboats through narrow canals.
In the works is also a system that displays the AprilTags on an LCD monitor that changes codes to signal multiple roboat units to assemble in a given order. En primer lugar, all roboat units will be given a code to stay exactly a meter apart. Luego, the code changes to direct the first roboat to latch. Después, the screen switches codes to order the next roboat to latch, etcétera. "It's like the telephone game. The changing code passes a message to one roboat at a time, and that message tells them what to do, " Mateos says.
Darwin Caldwell, the research director of Advanced Robotics at the Italian Institute of Technology, envisions even more possible applications for the autonomous latching capability. "I can certainly see this type of autonomous docking being of use in many areas of robotic refueling and docking … beyond aquatic/naval systems, " él dice, "including inflight refueling, space docking, cargo container handling, [and] robot in-house recharging."
Esta historia se vuelve a publicar por cortesía de MIT News (web.mit.edu/newsoffice/), un sitio popular que cubre noticias sobre la investigación del MIT, innovación y docencia.