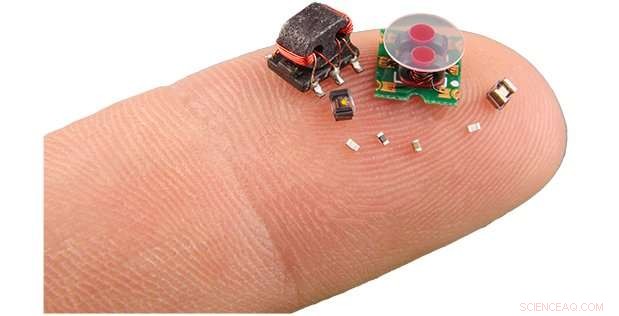
Crédito:DARPA
A principios de este mes, DARPA anunció que está lanzando un nuevo programa de Plataformas Microrobóticas Independientes de Rango Corto (SHRIMP). SHRIMP desarrollará y demostrará plataformas robóticas de micro a mili para escenarios provocados por desastres naturales y críticos.
Como Espectro IEEE Ponlo, es un programa para desarrollar "robots a escala de insectos" para la recuperación de desastres y entornos de alto riesgo. El tema es lo suficientemente simple de entender y también es obvio que los medios para lograr estas plataformas son difíciles.
DARPA, dijo su anuncio, enfrentará el desafío de "crear microrobóticas extremadamente restringidas por SWaP". SWaP se refiere al tamaño, peso y potencia.
La Agencia de Proyectos de Investigación Avanzada de Defensa de los Estados Unidos (DARPA) está interesada en hacerlo bien para las misiones de búsqueda y rescate. Un poderoso robot gigante puede estar lo suficientemente decidido como para realizar hazañas heroicas como limpiar escombros, pero es el enjambre de insectos-robots lo que atrae la atención de DARPA para los escenarios de búsqueda y rescate que requieren moverse a través de pequeñas grietas y hendiduras. Espectro IEEE Evan Ackerman comentó que en búsqueda y rescate, "está mejor con muchos robots muy pequeños que cubran la mayor cantidad de terreno posible".
SHRIMP de DARPA son las siglas de Plataformas Microrobóticas Independientes de Corto Alcance. Dicho eso el diablo estará en los detalles de los componentes, incluidos los actuadores, sistemas de movilidad y almacenamiento de energía.
Tamaño, peso, y el poder son los tres desafíos que requieren atención. De los tres, el poder es el más grande, dijo Ackerman. Considerar, diminutos robots sin ataduras y la rapidez con la que pueden quedarse sin energía.
"La mayoría de las plataformas de micro-robótica dependen de las correas para poder, Procesando, o control, y están significativamente limitados por la tecnología de actuación ineficiente en energía, así como por los dispositivos de almacenamiento de energía limitada, ", dijo el anuncio de DARPA.
Sin embargo, quieren que los robots de micro a mili operen de forma independiente. Sucesivamente, "La creación de convertidores y fuentes de energía compactas que puedan admitir mecanismos de actuación de alto voltaje y reducir significativamente el consumo de la batería se vuelve fundamental".
DARPA está poniendo todo esto en un desafío. Ackerman dijo que la competencia podría ocurrir alrededor de marzo de 2019. Puede esperar ver la competencia en dos partes, uno para actuadores y fuentes de energía y el otro para robots completos.
El informe de Ackerman tenía más detalles de la competencia:"DARPA espera que los equipos desarrollen sistemas que pesen menos de un gramo y quepan en un centímetro cúbico". También enumeró algunos de los eventos de competencia para la competencia de actuadores y fuentes de energía en las alas. Incluyen salto de altura, levantamiento de pesas una masa, y granulometría. El cortocircuito es donde un sistema de potencia de actuador microrobótico debe propulsar una masa horizontalmente, "con la distancia medida sólo en la dirección horizontal como criterio de evaluación".
Los resúmenes vencen el 10 de agosto de y las propuestas deben presentarse hasta el 26 de septiembre. Las innovaciones de investigación y los descubrimientos que resulten podrían tener un impacto más allá de las misiones de búsqueda y rescate. PCMag citó al Dr. Ronald Polcawich, un gerente de programa de DARPA.
"Si bien el objetivo de SHRIMP es desarrollar a pequeña escala, plataformas robóticas independientes, anticipamos que los descubrimientos hechos a través de nuestra investigación sobre actuadores y almacenamiento de energía podrían resultar beneficiosos para una serie de campos actualmente limitados por estos desafíos técnicos, desde la prótesis hasta la dirección óptica ".
© 2018 Tech Xplore