Comportamientos típicos de las gotas manipuladas utilizando el robot de accionamiento magnético. Crédito:Science Advances, doi:10.1126 / sciadv.aay5808
La manipulación de gotas en la ciencia de los materiales puede contribuir a la recolección de agua, diagnósticos médicos y técnicas de administración de fármacos. Si bien las operaciones líquidas basadas en estructuras se utilizan ampliamente en la naturaleza y en materiales artificiales bioinspirados, Las estrategias de laboratorio dependen de estructuras fijas para el movimiento unidireccional del agua. En un nuevo estudio sobre Avances de la ciencia , An Li y un equipo de investigación del Instituto de Química y la Academia de Ciencias de la Universidad de China en China propusieron desarrollar un robot accionado magnéticamente. La construcción tenía estructuras ajustables para distribuir las fuerzas de resistencia y determinar el comportamiento de las gotas. El robot podría transportar separar, Liberar y rotar gotas para aplicaciones universales en varios campos y entornos difíciles. Los nuevos hallazgos ofrecen una estrategia eficiente para la manipulación automatizada de gotas.
En este trabajo, Li y col. utilizaron métodos fiables para manipular las gotas utilizando un robot accionado magnéticamente con perlas de acero en un campo magnético programable. Los científicos controlaron la estructura del robot ajustando el campo magnético. Las estructuras de robot diferenciadas condujeron a diversas combinaciones de comportamiento de gotas, incluida la división, liberación, rotación y transporte. El robot es universalmente aplicable a varios fluidos, incluido el agua, petróleo y gas. Li y col. Accionamiento asistido del robot en espacios limitados, en superficies irregulares e incluso en condiciones anhidras o anaeróbicas. La obra tiene un gran potencial para el transporte de materiales, microfabricación y en medicina clínica.
La manipulación de gotas en el laboratorio está inspirada en la naturaleza. Por ejemplo, plantas y animales han exhibido sistemas de recolección de niebla en cactus, recolección de agua en la seda de araña e influyó en el comportamiento del escarabajo del desierto de Namib para recolectar y mover agua. La estructura asimétrica e intrínseca para la recolección de muestras de agua puede inducir un gradiente de presión de Laplace en las gotas, provocando movimiento en una dirección preestablecida. Los investigadores pueden utilizar varias estrategias externas, incluida la electricidad, imanes acústica y superficies humectantes para activar su movimiento. De estos, La fuerza magnética tiene la ventaja de una acción de largo alcance, seguridad y facilidad de control. Los investigadores habían utilizado partículas magnéticas para arrastrar gotas de agua a través de superficies hidrofóbicas o estampadas y a través de materiales magnéticamente sensibles.
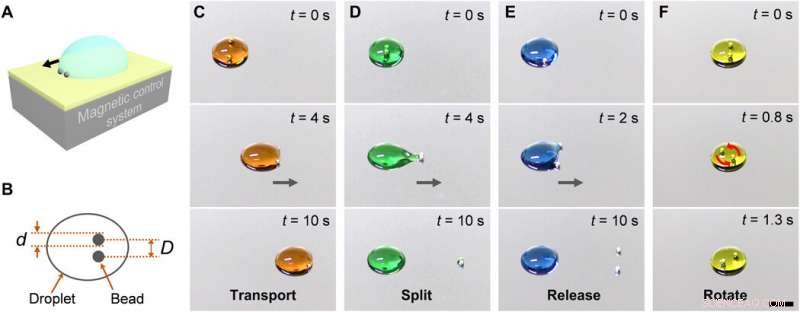
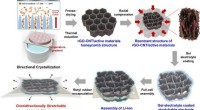
Esquema y demostración del robot de accionamiento magnético. (A) Esquema del sistema de manipulación de gotas. (B) Parámetros que describen el robot accionado magnéticamente. (C a F) Comportamientos típicos de las gotitas manipuladas por el robot. Las gotitas se pueden transportar (C), dividir (D), liberado (E), y girado (F) por el robot. Las flechas grises representan la dirección de movimiento de los robots. La velocidad de movimiento es de 2 mm / s. El volumen de las gotitas es de 250 μl. Barra de escala, 5 mm. Crédito:Science Advances, doi:10.1126 / sciadv.aay5808
Li y col. llamó a las dos perlas de acero en el sistema de control magnético el 'robot' y coloreó las gotas de agua con aditivos alimentarios para identificar claramente los diferentes modos de actuación. El robot hidrófilo (amante del agua) capturó fácilmente la gota al contacto. El equipo de investigación transfirió la gota y ajustó su estructura para dividir una gota hija o liberar la gota reduciendo o aumentando la distancia entre las perlas. El proceso se basó principalmente en la estructura robótica donde su volumen (V) influyó en el resultado. Li y col. cuantificó la estructura del robot utilizando la distancia de centro a centro de las perlas al diámetro (D / d). Por ejemplo, un robot con una relación D / d de 1,67 podría transportar una gota de agua de 150 µL. Sin embargo, si la gota se agrandó a 350 µL, se dividiría. Para entender esto analizaron mecánicamente todo el sistema y luego determinaron que la fuerza impulsora detrás del dispositivo era la adhesión entre la cuenta y la gota.

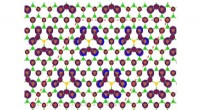
Visualización de las reacciones de neutralización basadas en ácidos escalonadas. Crédito:Science Advances, doi:10.1126 / sciadv.aay5808
Después de controlar la gota de agua en el aire, el equipo investigó el robot en diferentes condiciones, incluidas diversas atmósferas. Por ejemplo, arrastraron una gota para moverla hacia arriba o hacia abajo superando las fuerzas de la gravedad y las fuerzas de adhesión entre las diferentes gotas y el sustrato. Estos dispositivos tienen aplicaciones en espacios limitados como cajas y tubos vitales en microfluidos y medicina clínica. El transporte sin pérdidas y el control preciso de los reactivos son vitales para las microrreacciones químicas cuantitativas que se emplean ampliamente en la química analítica. diagnóstico y biotecnología. Por ejemplo, Li y col. llevó a cabo reacciones secuenciales de neutralización ácido-base a través de la manipulación programable de gotas del robot, para dividir una gota hija y transferirla para formar una gota neutra. Los robots proporcionaron una ruta versátil para controlar automáticamente las gotas de micro-reacciones utilizando alícuotas precisas de reactivo que son típicamente tóxicos. de naturaleza radiactiva o explosiva.
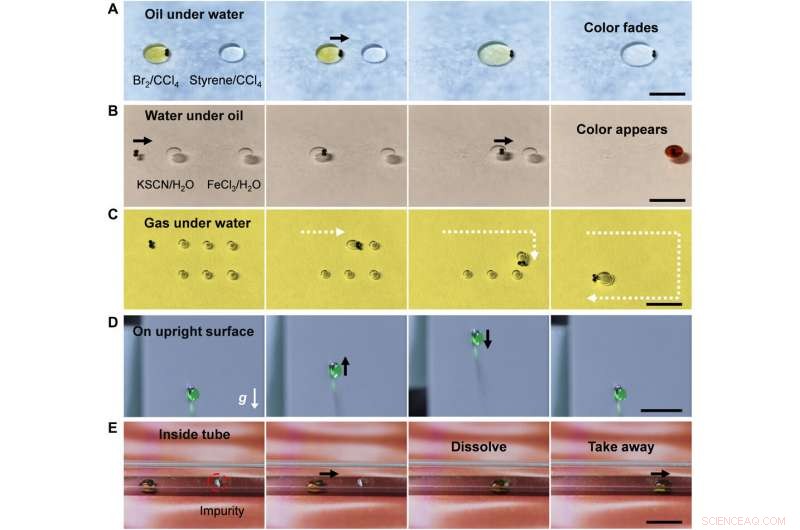
Demostración de generalidad del robot. (A) Manipulación de gotas de aceite bajo el agua. Las gotas de aceite (100 μl) se disuelven en CCl4 con Br2 (izquierda) y estireno (derecha). El robot transporta la gota izquierda para mezclarla con la derecha. (B) Manipulación de gotas de agua bajo aceite (n-heptadecano). Las gotas (50 μl) se disuelven en agua con KSCN (izquierda) y FeCl3 (derecha), respectivamente. La gota izquierda es capturada por el robot y transportada a la derecha. (C) Manipulación de burbujas de gas bajo el agua. Un robot superhidrofóbico puede recoger sucesivamente las burbujas de gas (20 μl). La línea punteada blanca indica la trayectoria del robot. (D) Manipulación de una gota de agua en la superficie vertical. El robot transporta una gota de agua de 20 μl para moverse hacia arriba y hacia abajo con una velocidad de 2 mm / s. (E) Manipulación de una gota de agua dentro de un tubo. El robot acciona una gota (20 μl) para capturar la impureza dentro de un tubo. Después de 1 min, la impureza se disuelve y se elimina mediante la gota. El círculo rojo punteado indica la ubicación de la impureza. La flecha negra indica el movimiento de la gota. Barras de escala, 10 mm. Crédito:Science Advances, doi:10.1126 / sciadv.aay5808
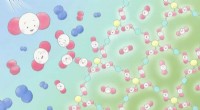
Luego, los científicos de investigación simularon procesos biomédicos en el laboratorio para explorar el potencial del robot durante aplicaciones médicas in vivo. Primero simularon cálculos o depósitos minerales que se encuentran en órganos como el riñón y la vesícula biliar, que generalmente permanecen intactas debido a límites estructurales que impiden su remoción quirúrgica. Usando el microrobot, arrastraron una gota de fármaco sobre los cálculos simulados hasta los cálculos para una fácil recolección y extracción (según la compatibilidad entre las dos superficies). En el próximo experimento, demostraron el potencial del robot para eliminar o limpiar los vasos sanguíneos mediante la acumulación de un exceso de colesterol en las arterias coronarias, representado con un tubo lleno de agua. Transportaron las gotas de la droga para capturar la placa simulada y disolvieron la droga para su eliminación por el robot. Los métodos innovadores pueden tener funciones versátiles para aplicaciones médicas in vivo.
Simulación de administración de fármacos. Crédito:Science Advances, doi:10.1126 / sciadv.aay5808
De este modo, An Li y sus colegas propusieron una estrategia simple y general para manipular gotas utilizando un robot accionado magnéticamente hecho de dos perlas de acero. Controlaron la estructura mediante un campo magnético que regulaba la distribución de las fuerzas resistivas en los segmentos delantero y trasero de la gota. Se dieron cuenta de múltiples comportamientos para las gotas, incluido el transporte, separar, liberación y rotación. Además de manipular las gotas de agua en el aire, el robot se mostró prometedor para transportar líquidos complejos como aceite, agua en aceite y gas en agua. Las perlas de acero mostraron maniobrabilidad de las gotas en espacios limitados, incluidos los entornos tóxicos y radiactivos. El trabajo tiene un potencial significativo en los campos de la fabricación de dispositivos, detección y bioensayo, así como en medicina in vivo. El equipo prevé que las optimizaciones adicionales del sistema permitirán la manipulación de gotas más pequeñas a escala de nano y pico litros con una biocompatibilidad mejorada.
© 2020 Science X Network