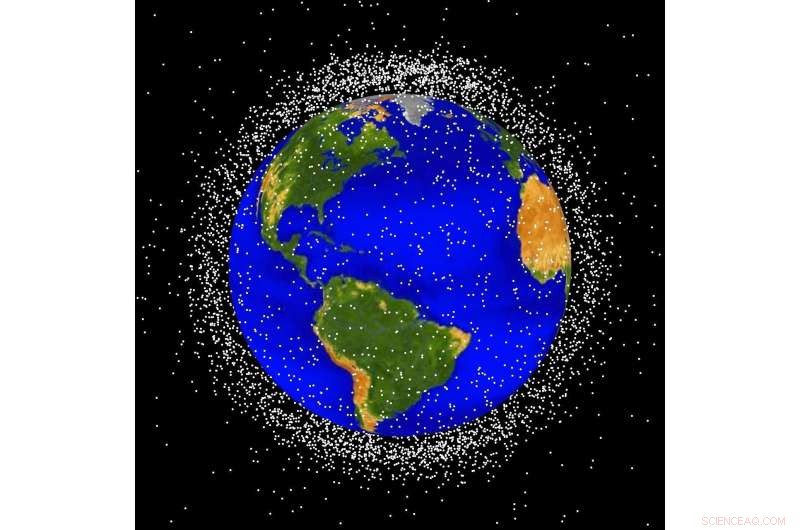
Crédito:Pixabay / CC0 Public Domain
¿Cómo se mide la pose, es decir, la rotación tridimensional y la traslación tridimensional, de un trozo de basura espacial para que un satélite que lo agarre pueda capturarlo en tiempo real para eliminarlo con éxito de la órbita de la Tierra? ¿Qué papel jugarán los algoritmos de aprendizaje profundo? Y, ¿Qué es el tiempo real en el espacio? Estas son algunas de las cuestiones que se abordan en un proyecto pionero, liderado por la escisión EPFL, ClearSpace, desarrollar tecnologías para capturar y desorbitar los desechos espaciales.
Con más de 34, 000 piezas de basura orbitando alrededor de la Tierra, su eliminación se está convirtiendo en una cuestión de seguridad. A principios de este mes, un antiguo satélite de navegación soviético Parus y un cohete chino ChangZheng-4c estuvieron involucrados en un casi accidente y en septiembre la Estación Espacial Internacional realizó una maniobra para evitar una posible colisión con una pieza desconocida de desechos espaciales. mientras que la tripulación de la Expedición 63 de la ISS se acercó a su nave espacial Soyuz MS-16 para prepararse para una posible evacuación. Con más basura acumulada todo el tiempo, las colisiones de satélites podrían convertirse en algo común, haciendo que el acceso al espacio sea peligroso.
ClearSpace-1, la primera misión de la empresa prevista para 2025, supondrá recuperar la parte superior de Vespa ahora obsoleta, un adaptador de carga útil que orbita a 660 kilómetros sobre la Tierra que una vez fue parte del cohete Vega de la Agencia Espacial Europea, para asegurarse de que vuelva a entrar en la atmósfera y se queme de forma controlada.
Uno de los primeros desafíos es permitir que los brazos robóticos de un cohete de captura se acerquen a la Vespa desde el ángulo correcto. Para tal fin, utilizará una cámara adjunta, sus ojos, para averiguar dónde está la basura espacial, de modo que pueda agarrar la Vespa y luego devolverla a la atmósfera. "Un enfoque central es desarrollar algoritmos de aprendizaje profundo para estimar de manera confiable la pose 6D (3 rotaciones y 3 traslaciones) del objetivo a partir de secuencias de video, aunque las imágenes tomadas en el espacio son difíciles. Pueden estar sobreexpuestas o subexpuestas con muchas superficies de espejo, "dice Mathieu Salzmann, un científico que encabeza el proyecto dentro del Laboratorio de Visión por Computadora de la EPFL dirigido por el profesor Pascal Fua, en la Facultad de Ciencias de la Computación y la Comunicación.
Sin embargo, hay una trampa. Nadie ha visto realmente la Vespa durante siete años, ya que ha estado girando en el vacío en el espacio. Sabemos que tiene unos 2 metros de diámetro, con fibras de carbono oscuras y un poco brillantes, pero, ¿sigue siendo así?
Realistic Graphics Labis de EPFL que simula cómo se ve este pedazo de basura espacial como el 'material de capacitación' para ayudar a que los algoritmos de aprendizaje profundo de Salzmann mejoren con el tiempo. "Estamos produciendo una base de datos de imágenes sintéticas del objeto de destino, incluyendo tanto el telón de fondo de la Tierra reconstruido a partir de imágenes de satélite hiperespectrales, y un modelo detallado en 3-D del escenario superior de Vespa. Estas imágenes sintéticas se basan en mediciones de muestras de materiales del mundo real de paneles de aluminio y fibra de carbono, adquirido utilizando el goniofotómetro de nuestro laboratorio. Este es un gran dispositivo robótico que gira alrededor de una muestra de prueba para iluminarlo y observarlo simultáneamente desde muchas direcciones diferentes. proporcionándonos una gran cantidad de información sobre la apariencia del material, "dice el profesor asistente Wenzel Jakob, jefe del laboratorio. Una vez que comience la misión, los investigadores podrán capturar algunas imágenes de la vida real desde más allá de nuestra atmósfera y ajustar los algoritmos para asegurarse de que funcionen in situ.
Un tercer desafío será la necesidad de trabajar en el espacio, en tiempo real y con una potencia informática limitada a bordo del satélite de captura ClearSpace. Dr. Miguel Peón, un colaborador postdoctoral senior del Laboratorio de sistemas integrados de EPFL está liderando el trabajo de transferir los algoritmos de aprendizaje profundo a una plataforma de hardware dedicada. "Dado que el movimiento en el espacio se comporta bien, los algoritmos de estimación de pose pueden llenar los vacíos entre los reconocimientos espaciados con un segundo de diferencia, aliviar la presión computacional. Sin embargo, para garantizar que puedan hacer frente de forma autónoma a todas las incertidumbres de la misión, los algoritmos son tan complejos que su implementación requiere exprimir todo el rendimiento de los recursos de la plataforma, "dice el profesor David Atienza, jefe de ESL.
Está claro que diseñar algoritmos que sean 100% fiables en situaciones tan duras, y relativamente desconocido, condiciones, y que funcionan en tiempo real utilizando recursos computacionales limitados, es un tremendo desafío. Para Salzmann, esto es parte del atractivo del proyecto, "Necesitamos ser absolutamente fiables y sólidos. Desde una perspectiva de investigación, normalmente está satisfecho con el 90% de éxito, pero esto es algo que realmente no podemos permitirnos en una misión real. Pero quizás el aspecto más emocionante del proyecto es que estamos desarrollando un algoritmo que eventualmente funcionará en el espacio. ¡Encuentro esto absolutamente asombroso y eso es lo que me motiva todos los días! "
Este trabajo pionero se ha ejecutado con el apoyo del equipo de Microsoft para Startups, que proporcionó el poder de procesamiento de Azure.