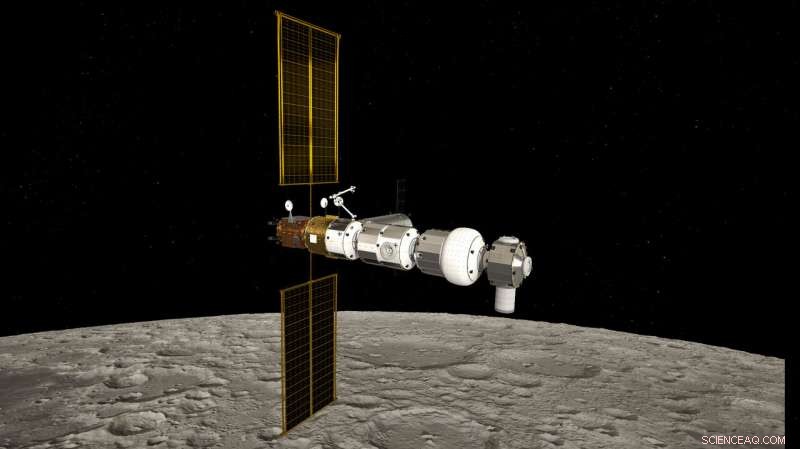
Impresión artística del Gateway sobre la luna. El Gateway es la próxima estructura que lanzarán los socios de la Estación Espacial Internacional. Crédito:ESA / NASA / ATG Medialab
Este otoño verá una serie de experimentos que controlan robots desde lejos, con el astronauta de la ESA Luca Parmitano dirigiendo un robot en los Países Bajos e ingenieros en Alemania controlando un rover en Canadá.
Imagínese mirando la Luna desde el Portal mientras se prepara para aterrizar cerca de una base lunar para realizar experimentos, pero sabe que la base necesita trabajo de mantenimiento en el sistema de soporte vital que llevará días. Sería mejor mantener la base desde la órbita para que los astronautas puedan ponerse a trabajar directamente una vez en la Luna.
Las asociaciones humano-robóticas son el núcleo de la estrategia de exploración de la ESA, que incluye prepararse para escenarios como este enviando exploradores robóticos a la Luna y planetas, de la mano de los astronautas que los controlan desde la órbita.
El proyecto Meteron se formó para desarrollar la tecnología y los conocimientos necesarios para operar vehículos exploradores en estas duras condiciones. Cubre todos los aspectos de las operaciones, desde las comunicaciones y la interfaz de usuario hasta las operaciones en la superficie e incluso la conexión de los robots con los astronautas mediante el sentido del tacto.
Control robótico histórico
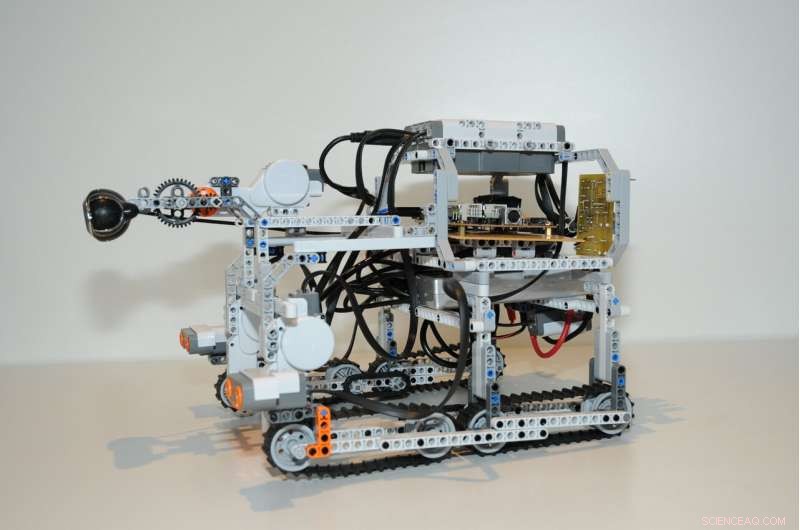
El primer experimento tuvo lugar en 2012 cuando la astronauta de la NASA Sunita Williams controló un rover LEGO en Alemania para probar una 'Internet espacial' recientemente desarrollada, demostrando que es posible controlar un rover desde la órbita. Esta no es una hazaña fácil ya que las señales de la Estación Espacial Internacional hacen un viaje de ida y vuelta de 144 400 km. A medida que el puesto de avanzada se mueve alrededor de la Tierra a 29 000 km / h, las señales viajan hasta satélites de casi 36 000 km de altura y luego bajan a una estación terrestre de EE. UU. en Nuevo México, a través de NASA Houston ya través de un cable transatlántico a Europa, y viceversa.
Mocup es uno de los vehículos de prueba de la iniciativa de la ESA para futuras misiones a la Luna. Marte y otros cuerpos celestes. Crédito:Agencia Espacial Europea
En paralelo, Los ingenieros trabajaron para diseñar la interfaz de usuario para que los astronautas controlaran los robots. Como este es un campo nuevo, aspectos como las vistas de cámara, palancas de mando e incluso si se debía utilizar una computadora tradicional o una pantalla táctil tuvo que ser considerado y diseñado.
De las pruebas iniciales, rovers más grandes como Eurobot fueron controlados desde el espacio, mientras que los equipos del centro técnico de la ESA en los Países Bajos comenzaron a experimentar con retroalimentación háptica, permitiendo que los astronautas sientan lo que toca el robot. En 2015, un histórico "apretón de manos" orbital ocurrió entre el astronauta de la NASA Terry Virts y una persona en la Tierra a más de 5000 km de distancia.
Solo unos meses después de ese hito, El astronauta de la ESA Andreas Mogensen controló un rover para insertar una clavija de metal en un agujero redondo en un 'tablero de tareas' con precisión milimétrica. simulando la reparación de una conexión eléctrica.

El astronauta de la ESA Andreas Mogensen se está preparando para su vuelo de 10 días a la Estación Espacial Internacional en septiembre que lo verá probando muchas tecnologías nuevas. Conoció al rover Eurobot en el centro técnico de la ESA en Noordwijk, Los países bajos, el martes por primera vez. Crédito:ESA – J. Harrod
Las pruebas han continuado con creciente fidelidad. La semana pasada, un equipo de la ESA con base en tierra junto con la Agencia Espacial Canadiense practicaron operaciones nocturnas. Expertos en el centro de control de misión de la ESA en Darmstadt, Alemania, controló el rover Juno de CSA desde el otro lado del Océano Atlántico, con el asesoramiento de un equipo científico del centro técnico ESTEC de la ESA en los Países Bajos, se utiliza una configuración similar para las operaciones diarias de la Estación Espacial Internacional.
El experimento de cuatro horas vio a Juno viajar más de dos kilómetros cubriendo seis 'puntos de referencia' mientras tomaba escaneos de sus alrededores e inspeccionaba áreas de interés científico. Ninguno de los equipos de Europa sabía exactamente qué esperar, tal como lo harían durante una misión lunar real.
"El experimento MAGIC realmente fue un gran éxito, "dice Kim Nergaard, Jefe de Conceptos de Misión Avanzada en el centro de operaciones ESOC de la ESA en Darmstadt, Alemania.
"Nos enfrentamos a algunos problemas, por supuesto, en un momento el rover fue demasiado cauteloso con una roca relativamente pequeña, pero llegamos a nuestro punto final dentro del tiempo asignado y logramos todos los objetivos que nos propusimos, aprendiendo mucho en el camino ".
Poniendolo todo junto
En noviembre de 2019, El proyecto Meteron reunirá todos los elementos cuando el astronauta de la ESA Luca Parmitano opere el rover Interact en los Países Bajos desde la Estación Espacial Internacional.
Este experimento, apodado Analog-1, combinará todos los conocimientos técnicos de una década del proyecto Meteron en una prueba a gran escala:operar un rover desde la órbita para recolectar muestras científicas de roca lunar. Luca tendrá un equipo en el centro de astronautas de Europa en Colonia, Alemania, actuando como control de la misión y podrá sentir lo que Interact siente utilizando la tecnología de retroalimentación háptica desarrollada por el Laboratorio de Telerobotics de la ESA.