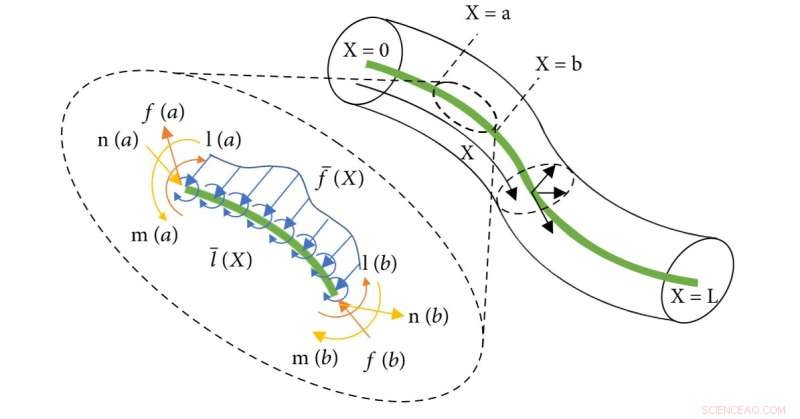
Diagrama de análisis de fuerzas de medios continuos. Crédito:Cyborg y Bionic Systems (2022). DOI:10.34133/2022/9783517
Un artículo de revisión de científicos de la Universidad de Zhejiang resumió el desarrollo de robots continuos desde los aspectos de diseño, actuación, modelado y control. El nuevo artículo de revisión, publicado el 26 de julio en la revista Cyborg and Bionic Systems , proporcionó una visión general de las tecnologías clásicas y avanzadas de los robots continuos, junto con algunas perspectivas urgentes por resolver.
"Algunos robots continuos a pequeña escala con nuevos métodos de actuación están siendo ampliamente investigados en el campo del tratamiento quirúrgico intervencionista o endoscopia, sin embargo, la caracterización de sus propiedades mecánicas sigue siendo un problema diferente", explicó el autor del estudio Haojian Lu, profesor de la Universidad de Zhejiang.
Con el fin de realizar la miniaturización de los robots continuos, se han desarrollado y utilizado muchos materiales de última generación para realizar la actuación de los robots, mostrando ventajas únicas. Los robots continuos integrados con microimán o hechos de material compuesto ferromagnético tienen una capacidad de dirección precisa bajo un campo magnético controlable externo; Los robots continuos magnéticamente suaves, por otro lado, pueden lograr diámetros pequeños, hasta la escala de micras, lo que garantiza su capacidad para realizar terapias dirigidas en bronquios o en vasos cerebrales.
Sin embargo, es difícil para los robots continuos magnéticamente blandos mantener la estabilidad bajo fuerzas externas, y las diminutas puntas rígidas de los imanes corren el riesgo de caerse dentro del cuerpo durante el funcionamiento. Para lograr un control más seguro y confiable, se utilizan materiales con memoria de forma para impulsar el robot continuo y para el examen cardiovascular y la administración nasofaríngea. La ventaja clave de este material autodeformable es que proporciona extensión, flexión y torsión para el vástago principal y puede lograr una actuación general manteniendo una pequeña escala, pero su histéresis inherente dificulta lograr una respuesta rápida y un posicionamiento preciso en el al mismo tiempo, tiene una capacidad de carga baja y un cableado de tuberías bastante complejo.
Teniendo en cuenta las deformaciones no lineales causadas por la actuación, la elasticidad del material y la sensibilidad al contacto con el entorno, los robots continuos enfrentan grandes desafíos en el modelado analítico preciso.
Uno de los mayores desafíos en el modelado es simplificar los modelos y comprometer la relación entre la complejidad del cálculo y la precisión del modelo.
De manera similar, el problema del control también es un gran desafío para el robot continuo. El desafío es encontrar el valor de actuación adecuado para alcanzar el estado deseado para realizar una tarea determinada. El control basado en modelos depende en gran medida del modelado preciso del robot continuo y de la precisión de percepción de los sensores. Además, la operación remota se usa a menudo para controlar el robot continuo en el campo médico.
"El campo de investigación de los robots continuos ha progresado mucho, pero aún quedan algunos problemas por resolver, incluida la miniaturización, una percepción más poderosa y el motor de simulación estable", dijo Lu. Cómo un robot delgado con forma de serpiente podría ofrecer a los médicos nuevas formas de salvar vidas