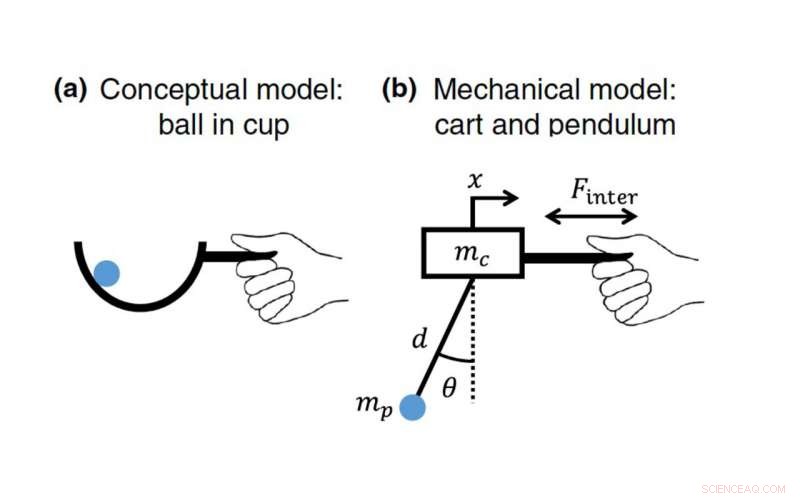
Una ilustración esquemática del sistema carro-péndulo para simular el manejo humano de un objeto complejo, como una taza de café caliente:(a) un modelo conceptual de una bola rodando dentro de una taza circular y (b) un modelo mecánico no lineal de un péndulo unido a un carro en movimiento, que se describe matemáticamente mediante un conjunto de ecuaciones diferenciales. Crédito:Brent Wallace, Ying-Cheng Lai, Universidad del estado de Arizona
Caminar con café es algo que la mayoría de nosotros hacemos todos los días sin considerar el acto de equilibrio que requiere. De hecho, hay mucha física que evita que el café se derrame.
El café, un fluido térmicamente agitado contenido en una taza, tiene grados internos de libertad que interactúan con la copa que, Sucesivamente, interactúa con el portador humano.
"Si bien los humanos poseen un o superdotado, capacidad para interactuar con objetos complejos, nuestra comprensión de esas interacciones, especialmente a nivel cuantitativo, está al lado de cero, "dijo el profesor de ASU Ying-Cheng Lai, un profesor de ingeniería eléctrica de la Universidad Estatal de Arizona. "No tenemos la capacidad consciente de analizar las influencias de factores externos, como el ruido o el clima, en nuestras interacciones ".
Todavía, Comprender estos factores externos es un tema fundamental en campos aplicados como la robótica blanda.
"Por ejemplo, en el diseño de prótesis inteligentes, es cada vez más importante construir modos naturales de flexibilidad que imiten el movimiento natural de las extremidades humanas, "dijo Brent Wallace, ex estudiante de pregrado de Lai y ahora estudiante de doctorado en las Escuelas de Ingeniería Ira A. Fulton de ASU. "Estas mejoras hacen que la prótesis se sienta más cómoda y natural para el usuario".
Según Lai, es concebible que, En un futuro no muy lejano, Los robots se desplegarán en varias aplicaciones de manipulación o control de objetos complejos que requieren el tipo de coordinación y control de movimiento que los humanos hacen bastante bien.
Si un robot está diseñado para caminar con una zancada relativamente corta, entonces se permiten variaciones relativamente grandes en la frecuencia de caminar. Sin embargo, si se desea una zancada más larga, entonces la frecuencia de caminata debe seleccionarse cuidadosamente.
Un nuevo artículo publicado en Revisión física aplicada , "Transición síncrona en el control de objetos complejos, "se originó con Wallace como parte de su proyecto de diseño senior en ingeniería eléctrica, supervisado por Lai. Wallace ha recibido una beca de posgrado de NSF y ahora es estudiante de doctorado en la Escuela de Electricidad de ASU, Ingeniería Informática y Energética.
La investigación del equipo de ASU se expande de manera innovadora, estudio experimental virtual realizado recientemente por investigadores de la Northeastern University, usando el paradigma de sostener la taza de café y agregando una bola rodante, para examinar cómo los humanos manipulan un objeto complejo. Los participantes rotaron deliberadamente la copa de una manera rítmica con la capacidad de variar la fuerza y la frecuencia para asegurar que la pelota permaneciera contenida.
El estudio de Northeastern mostró que los participantes tienden a seleccionar una estrategia de baja o alta frecuencia (movimiento rítmico de la taza) para manejar un objeto complejo.
Un hallazgo notable fue que cuando se utilizó una estrategia de baja frecuencia, las oscilaciones exhiben sincronización en fase, pero la sincronización antifase surge cuando se emplea una estrategia de alta frecuencia.
"Dado que tanto las frecuencias bajas como las altas son eficaces, es concebible que algunos participantes en el experimento virtual cambiaran de estrategia, ", dijo Wallace." Esto plantea preguntas.
"¿Cómo se produce una transición de la sincronización en fase asociada con una estrategia de baja frecuencia a la sincronización antifase asociada con una estrategia de alta frecuencia? o viceversa, "preguntó Wallace." En el espacio de parámetros, es el límite entre los regímenes de sincronización en fase y antifase aguda, gradual, o sofisticado? "
La investigación del equipo de ASU, impulsado por la curiosidad de Wallace, estudió la transición entre la sincronización en fase y antifase utilizando un modelo dinámico no lineal de un péndulo unido a un carro en movimiento sujeto a un forzamiento periódico externo.
Los investigadores encontraron que, en el régimen débilmente forzado, a medida que varía la frecuencia de conducción externa, la transición es abrupta y ocurre en la frecuencia de resonancia, que se puede entender completamente usando la teoría de control de sistemas lineales.
Más allá de este régimen, una región de transición emerge entre la sincronización en fase y antifase, donde los movimientos del carro y el péndulo no están sincronizados. También se encontró que hay biestabilidad en y cerca de la región de transición en el lado de baja frecuencia.
En general, Los resultados indican que los humanos pueden cambiar de manera abrupta y eficiente de un atractor sincrónico a otro, un mecanismo que puede explotarse para diseñar robots inteligentes que manejen de forma adaptativa objetos complejos en un entorno cambiante.
"Es posible que los seres humanos sean capaces de utilizar con destreza estrategias tanto en fase como antifase y cambiar de una estrategia a otra sin problemas, quizás sin siquiera darme cuenta. Los hallazgos de este estudio se pueden utilizar para implementar estas habilidades humanas en robots blandos con aplicaciones en otros campos, como rehabilitación e interfaz cerebro-máquina, "Dijo Lai.
Adicionalmente, Tareas tan triviales como tender cables en la carrocería de un automóvil en una línea de montaje, que los humanos realizan con facilidad, aún eluden las máquinas más avanzadas.
"Una comprensión cuantitativa sistemática de cómo los humanos interactúan dinámicamente con su entorno cambiará para siempre la forma en que diseñamos nuestro mundo, y puede revolucionar el diseño de prótesis inteligentes y marcar el comienzo de una nueva era de fabricación y automatización, ", dijo Wallace." Al imitar los comportamientos dinámicamente favorables adoptados por los humanos al manipular objetos complejos, podremos automatizar procesos que antes se creían imposibles ".