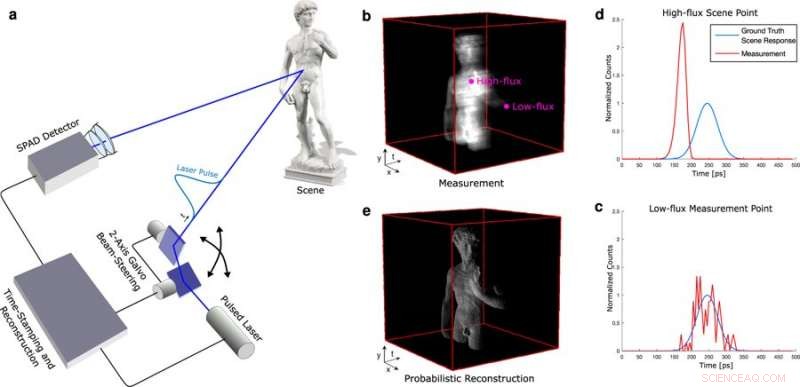
Marco de imágenes 3D de subpicosegundos. (a) Un colimado, El láser pulsado ilumina la escena en un solo punto. El láser se escanea lateralmente utilizando un galvanómetro de espejo de 2 ejes. La electrónica de control y temporización marca el tiempo de cada llegada de fotón detectada en relación con el último pulso emitido y acumula estos eventos en un histograma de recuentos de fotones espacio-temporales (b). Este histograma se procesa para estimar tanto la reflectividad como la información de profundidad (c). Se destacan dos puntos, uno correspondiente a medidas de alto flujo (d) y el otro a medidas de bajo flujo (e). Mientras que estos últimos son ruidosos, Las mediciones de alto flujo sufren una distorsión acumulada que introduce un sesgo significativo para la estimación de profundidad de los algoritmos convencionales. El método de estimación propuesto modela con precisión ambos escenarios, lo que permite estimar la información de reflectancia y el tiempo de viaje con una precisión de subpicosegundos a partir de mediciones muy distorsionadas. Crédito: Informes científicos , Doi:10.1038 / s41598-018-35212-x
Los diodos de avalancha de fotón único (SPAD, por sus siglas en inglés) son tecnologías de detección prometedoras que pueden usarse para lograr sistemas de imágenes 3D activos con adquisición rápida, alta precisión de sincronización y alta sensibilidad de detección. Estos sistemas tienen amplias aplicaciones en los dominios de la obtención de imágenes biológicas, teledetección y robótica. Sin embargo, los detectores se enfrentan a deficiencias técnicas conocidas como pileup que provocan distorsiones en la medición para limitar su precisión. En un estudio reciente, realizado en el Departamento de Ingeniería Eléctrica de la Universidad de Stanford, Los científicos Felix Heide y sus colaboradores desarrollaron un modelo probabilístico de formación de imágenes que podría modelar con precisión el choque. Usando el modelo propuesto, Los científicos idearon métodos inversos para estimar de manera eficiente y robusta la profundidad de la escena y la reflectancia a partir de los recuentos de fotones registrados. Con el algoritmo, pudieron demostrar mejoras en la precisión de la sincronización, en comparación con las técnicas existentes. Más importante, el modelo permitió precisión en el subpicosegundo en imágenes 3D de fotón eficiente por primera vez en escenarios prácticos, mientras que anteriormente solo se observaban recuentos de fotones muy variables. Los resultados ahora se publican en Informes científicos .
La imagen activa tiene amplias aplicaciones en todas las disciplinas que van desde la conducción autónoma hasta la obtención de imágenes microscópicas de muestras biológicas. Los requisitos clave para estas aplicaciones incluyen alta precisión con la sincronización, tasas de adquisición rápidas, rangos operativos dinámicos y alta sensibilidad de detección de objetos de imagen ocultos a la vista de la cámara. Las aplicaciones automatizadas y de teledetección exigen rangos de adquisición desde <1 metro en la escala de kilómetros.
La obtención de imágenes sin línea de visión se basa en la obtención de información codificada a través de los pocos fotones que regresan de luz indirecta dispersa de forma múltiple. además de la luz reflejada directamente. Para habilitar estas aplicaciones, Se desarrollaron detectores ultrasensibles para registrar fotones individuales que regresan de una fuente de iluminación pulsada. Los diodos de avalancha de un solo fotón (SPAD) son una de las tecnologías de detectores de resolución temporal más sensibles que se pueden producir utilizando el proceso de fabricación de semiconductores de óxido de metal complementario (CMOS). Los SPAD se establecieron rápidamente como una tecnología de detección de núcleos para imágenes en 3D.
En su principio de funcionamiento, Los SPAD son fotodiodos de polarización inversa que operan en modo Geiger, es decir, por encima de su voltaje de ruptura. Cuando los fotones inciden sobre la superficie activa de un SPAD, se puede desencadenar una avalancha de electrones con marca de tiempo. La marcación de tiempo repetida de los fotones que regresan de una fuente de iluminación pulsada sincrónicamente que normalmente opera a velocidades de MHz puede acumular un histograma de recuentos de fotones en el tiempo. El histograma resultante documenta la intensidad aproximada del pulso de luz que regresa para recuperar y caracterizar la distancia, reflectancia y geometría 3D de un objeto oculto a la vista.
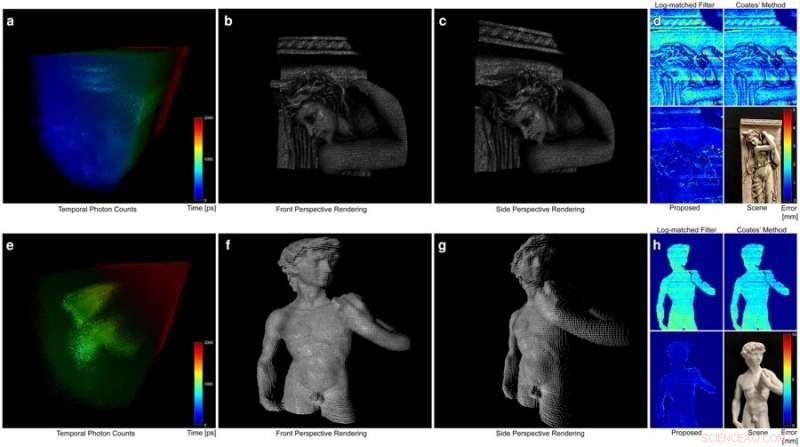
Reconstrucciones experimentales. Una distribución espacio-temporal registrada de los recuentos de fotones. (a, e) se procesa para estimar una nube de puntos 3D (b, C, F, g) que contiene información de profundidad y albedo, aquí se muestra para dos escenas diferentes (fotografías que se muestran en (d, h)). Los mapas de errores codificados por colores (d, h) comparar directamente los resultados de varias técnicas de estimación de profundidad, incluido el filtrado de registros coincidentes, Método de Coates seguido de ajuste gaussiano (en medición de alto flujo), y el método propuesto. Crédito: Informes científicos , Doi:10.1038 / s41598-018-35212-x
Dependiendo de la aplicación esperada, Los SPAD pueden funcionar en modo de ejecución libre (que permite que todos los eventos de fotones se detecten simultáneamente en todos los tiempos de llegada) o en modo cerrado (donde solo se detectan fotones en una ventana de tiempo específica entre pulsos). Todas las aplicaciones están sujetas a un fenómeno fundamental conocido como distorsión pileup que limita severamente la precisión. Pileup puede limitar inherentemente el principio de funcionamiento del detector SPAD. Por ejemplo, después de cada avalancha de electrones desencadenada, el detector requiere extinción antes de detectar más eventos de llegada de fotones. Durante este 'tiempo muerto' (diez a cientos de nanosegundos), el detector está inactivo. Esto puede provocar que los fotones anteriores de un solo pulso de láser desencadenen una avalancha, mientras que los pulsos posteriores probablemente se ignoren en el tiempo muerto; creando medidas sesgadas inexactas conocidas como pileup. El fenómeno se puede evitar operando sistemas de imágenes activos en un régimen de bajo flujo, como se ve con las técnicas de vanguardia utilizadas antes para la obtención de imágenes de primer fotón.
Sin embargo, las condiciones varían para las aplicaciones de imágenes 3D en robótica, imágenes biológicas o detección automotriz, ya que operan en entornos donde los objetos que reflejan un número alto y bajo de fotones son esenciales para la toma de decisiones. La gran variación en los recuentos de fotones adquiridos que resulta de diversas profundidades o la reflectividad variable de diferentes objetos es crucial para la obtención de imágenes en 3D. En este trabajo, Heide y col. introdujo un nuevo algoritmo de estimación que superó las limitaciones existentes de los sistemas de imágenes 3D activos que utilizan SPAD de ejecución libre.
El método propuesto mejoró la precisión de la estimación de profundidad y albedo existente, en una amplia gama, desde mediciones de flujo bajo hasta de flujo alto. Los científicos introdujeron un modelo probabilístico de formación de imágenes que incluía pileup, con métodos inversos eficientes derivados para estimaciones de profundidad y albedo. El marco de reconstrucción estimó de forma conjunta todos los parámetros desconocidos para superar las limitaciones algorítmicas que previamente restringían la precisión del tiempo. El método propuesto permitió obtener imágenes en 3D de alta precisión y rapidez para abrir nuevos regímenes operativos de imágenes en 3D con eficiencia de fotones aplicables en condiciones con recuentos de fotones que varían drásticamente.
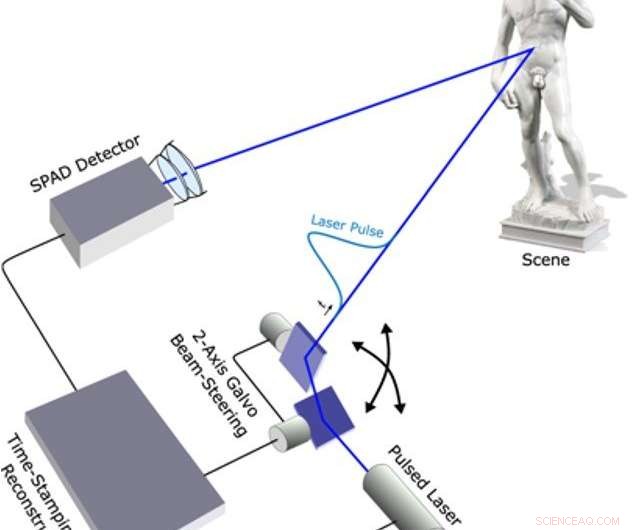
Hardware experimental para imágenes 3D. La ilustración esquemática muestra la escena de la "Estatua de David", fuente de iluminación y el procedimiento de sellado de tiempo para la reconstrucción de imágenes. Crédito: Informes científicos , Doi:10.1038 / s41598-018-35212-x
El rendimiento del método propuesto se evaluó en dos escenas con perfiles de reflectancia y profundidad muy variables, que incluía la estatua de David y una escena en bajorrelieve. Ambas instancias contenían objetos con geometrías complejas y propiedades de reflectancia variables, incluido el comportamiento especular de la "Estatua de David" y la reflectancia lambertiana con albedo variable espacialmente en la escena del "Bajorrelieve". Para ambas escenas, los científicos capturaron una medición de referencia de la verdad del terreno (información proporcionada por evidencia empírica) con un filtro de densidad neutra al 5%, que eliminó las distorsiones de pileup amortiguando la intensidad de la fuente.
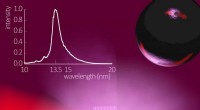
El hardware del sistema contenía un sensor de resolución temporal, láser pulsado, iluminación y óptica de captación. La configuración también tenía un conjunto de espejos de escaneo para lograr un patrón de iluminación de escaneo de trama. La sincronización de las llegadas de fotones se capturó con un módulo de recuento de fotones individuales correlacionados en el tiempo PicoHarp 300. La fuente de iluminación era un láser de picosegundos de 450 nm o 670 nm (que generaba un ancho completo a la mitad del máximo FWHM, anchos de pulso de 90 ps y 50 ps). La óptica de colección consistía en una lente objetivo de 75 m, Lente de relé de 30 mm y un objetivo de microscopio, diseñado para extender el campo de visión del SPAD a través del área escaneada por la fuente de iluminación.
Las mediciones experimentales sirvieron como entrada para el método propuesto y se adquirieron sin ningún filtro en el camino óptico. Durante el estudio se obtuvieron reconstrucciones de profundidad y albedo junto con los correspondientes mapas de error. Los resultados verificaron que el método propuesto logró reconstrucciones de alta calidad que no se vieron afectadas por el ruido de disparo o el ruido de disparo dependiente de la escena (ruido electrónico asociado con la naturaleza de partícula de la luz). Los resultados se compararon con los métodos convencionales, como la estimación de filtro con coincidencia de registros y el método de corrección de pileup de Coates que no suprimió de manera tan efectiva el pileup y sufrió de precisión de profundidad dependiente de la escena. A diferencia de, el método introducido por Heide et al. logró una precisión de subpicosegundos.
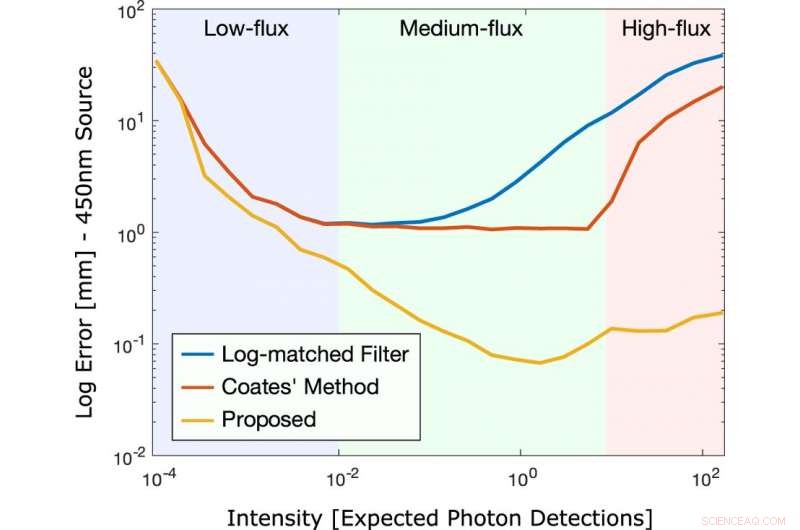
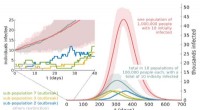
Régimen óptimo de recuento de fotones. Precisión de reconstrucción de profundidad para diferentes recuentos de fotones para el láser Alphalas LD-450-50 de 450 nm (FWHM de 90 ps). El filtro convencional adaptado a troncos, Método de Coates, y se comparan el método propuesto. El número óptimo de recuentos de fotones se encuentra en la región no convencional de 1 fotón detectado por pulso en promedio, independiente de la respuesta al impulso y para una amplia gama de anchos de intervalo de histograma. Crédito: Informes científicos , Doi:10.1038 / s41598-018-35212-x
El código y los datos utilizados por Heide et al. para generar los hallazgos del estudio estarán disponibles en GitHub. En total, el modelo de formación de imágenes probabilísticas propuesto y los métodos inversos correspondientes alcanzaron una precisión de subpicosegundos para la obtención de imágenes 3D activas, a pesar de que los anchos de pulso láser son superiores a 50 ps. El nuevo método logró una alta precisión en un rango dinámico desde mediciones de flujo bajo hasta de flujo alto en comparación con las técnicas tradicionales. En el futuro, el método propuesto puede facilitar la adquisición de largo alcance mediante la multiplexación de múltiples respuestas afectadas por pileup. La innovación propuesta allana el camino para sistemas de imágenes 3D con fotones eficientes, rápidos y precisos, donde en la práctica se observan recuentos de fotones muy variables. Las aplicaciones pueden abarcar amplias disciplinas para incluir mapas y navegación en 3D, reconstrucción y conservación de arte, conducción autónoma, visión para robots y máquinas, información geográfica, imágenes industriales y microscópicas.
© 2018 Science X Network