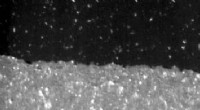
Para comprender sus estrategias para trabajar de manera eficaz sin obstruir los atascos de tráfico, Los investigadores estudiaron cómo las hormigas rojas cavaban túneles en partículas de vidrio que simulaban el suelo. Crédito:Rob Felt, Georgia Tech
Para hormigas y robots que operan en espacios reducidos como túneles, tener más trabajadores no significa necesariamente hacer más trabajo. Así como demasiados cocineros en una cocina se interponen en el camino de los demás, tener demasiados robots en los túneles crea obstrucciones que pueden detener el trabajo.
Un estudio publicado el 17 de agosto en la revista Ciencias muestra que en las colonias de hormigas bravas, un pequeño número de trabajadores hace la mayor parte de la excavación, dejando que las otras hormigas parezcan menos trabajadoras. Para cavar túneles de nidos, Este enfoque menos ajetreado hace el trabajo sin atascos de hormigas, lo que garantiza un flujo de excavación sin problemas. Los investigadores encontraron que aplicar la estrategia de optimización de hormigas a robots autónomos evita obstrucciones mecanizadas y hace el trabajo con la menor cantidad de energía.
Optimizar la actividad de los robots subterráneos autónomos podría ser útil para tareas como la recuperación de desastres, minar o incluso cavar refugios subterráneos para futuros exploradores planetarios. La investigación fue apoyada por el programa Physics of Living Systems de la National Science Foundation, la Oficina de Investigación del Ejército y la Cátedra de Familia Dunn.
"Notamos que si tienes 150 hormigas en un contenedor, solo 10 o 15 de ellos realmente estarán cavando en los túneles en un momento dado, "dijo Daniel Goldman, profesor de la Escuela de Física del Instituto de Tecnología de Georgia. "Queríamos saber por qué, y comprender cómo pueden actuar las leyes básicas de la física. Encontramos un funcional beneficio comunitario ante esta aparente desigualdad en el entorno laboral. Sin ello, cavar simplemente no se hace ".
Al monitorear las actividades de 30 hormigas que habían sido pintadas para identificar a cada individuo, Goldman y colegas, incluyendo la ex becaria postdoctoral Daria Monaenkova y Ph.D. estudiante Bahnisikha Dutta, descubrió que solo el 30 por ciento de las hormigas estaban haciendo el 70 por ciento del trabajo, una desigualdad que parece mantener el trabajo en marcha. Sin embargo, aparentemente no se debe a que las hormigas más ocupadas sean las más calificadas. Cuando los investigadores sacaron las cinco hormigas más trabajadoras del contenedor del nido, no vieron ninguna disminución de la productividad ya que los 25 restantes continuaron excavando.
Tener un nido es fundamental para las hormigas bravas, y si una colonia es desplazada por una inundación, por ejemplo, lo primero que harán las hormigas al llegar a tierra firme es comenzar a cavar. Sus túneles son estrechos, apenas lo suficientemente ancho para que pasen dos hormigas, una característica de diseño hipotetizada para dar ventajas de locomoción en los túneles verticales en desarrollo. Todavía, las hormigas saben cómo evitar la creación de obstrucciones al retirarse de los túneles ya ocupados por otros trabajadores y, a veces, al no hacer nada en absoluto.
Para evitar obstrucciones y maximizar la excavación en ausencia de un líder, Los robots construidos por el estudiante de maestría de Goldman, Vadim Linevich, fueron programados para capturar aspectos de las hormigas que deambulan y se retiran. Los investigadores descubrieron que hasta tres robots podrían trabajar eficazmente en un túnel horizontal estrecho excavando bolas de plástico magnéticas impresas en 3D que simulaban un suelo pegajoso. Si un cuarto robot entraba en el túnel, sin embargo, que produjo una obstrucción que detuvo el trabajo por completo.
"Cuando colocamos cuatro robots en un entorno confinado e intentamos que excavaran, inmediatamente se atascaron, "dijo Goldman, quien es el profesor de familia Dunn en la Facultad de Física. "Mientras observa las hormigas, Nos sorprendió ver que las personas a veces iban al túnel y si encontraban incluso una pequeña cantidad de obstrucción, simplemente darían la vuelta y se retirarían. Cuando ponemos esas reglas en combinaciones con los robots, eso creó una buena estrategia para excavar rápidamente con una baja cantidad de uso de energía por robot ".

Los robots construidos en el laboratorio del profesor Daniel Goldman en Georgia Tech excavan esferas impresas en 3D que están diseñadas para simular el suelo húmedo en el que excavan las hormigas. Crédito:Rob Felt, Georgia Tech
Experimentalmente, el equipo de investigación probó tres comportamientos potenciales para los robots, que ellos denominaron "ansiosos, "reversión" o "perezoso". Usando la estrategia ansiosa, los cuatro robots se lanzaron al trabajo y rápidamente se atascaron. En el comportamiento de reversión, los robots se dieron por vencidos y se dieron la vuelta cuando encontraron retrasos para llegar al lugar de trabajo. En la estrategia perezosa Se animaba a perder el tiempo.
"Eager es la mejor estrategia si solo tienes tres robots, pero si agregas un cuarto, ese comportamiento se estanca porque se interponen en el camino del otro, "dijo Goldman." La inversión produce una excavación relativamente sana y sensata. No es la estrategia más rápida, pero no hay atascos. Si miras la energía consumida, perezoso es el mejor curso ". Técnicas de análisis basadas en fluidos vidriosos y superenfriados, dirigido por ex Ph.D. estudiante Jeffrey Aguilar, dio una idea de cómo las diferentes estrategias mitigaron y previnieron los clústeres que formaban obstrucciones.
Para comprender lo que estaba pasando y experimentar con los parámetros, Goldman y sus colegas, incluido Will Savoie, un doctorado en tecnología de Georgia estudiante, El asistente de investigación Hui-Shun Kuan y la profesora Meredith Betterton de la Facultad de Física de la Universidad de Colorado en Boulder utilizaron modelos informáticos conocidos como autómatas celulares que tienen similitudes con la forma en que los ingenieros de tráfico modelan el movimiento de automóviles y camiones en una carretera.
"En las carreteras, muy pocos coches no proporcionan mucho flujo, mientras que demasiados coches crean un atasco, "Goldman dijo." Hay un nivel intermedio donde las cosas son mejores, y eso se llama diagrama fundamental. De nuestro modelado, aprendimos que las hormigas están trabajando justo en la cima del diagrama. La combinación correcta de distribuciones de trabajo desiguales y comportamientos de inversión tiene la ventaja de mantenerlos en movimiento con la máxima eficiencia sin atascamientos ".

Los investigadores de Georgia Tech utilizaron técnicas de impresión 3D para crear esferas huecas en las que se colocaron imanes sueltos. Las esferas simulaban suelo húmedo para probar las estrategias de trabajo de las hormigas. Crédito:Rob Felt, Georgia Tech
Los investigadores utilizaron robots diseñados y construidos para la investigación, pero no eran rival para las capacidades de las hormigas. Las hormigas son flexibles y robustas, capaces de pasar unos a otros en confines que harían que los robots inflexibles se atascaran. En algunos casos, los robots del laboratorio de Goldman incluso se dañaron unos a otros mientras se colocaban en posición para excavar.
Los hallazgos de la investigación podrían ser útiles para la exploración espacial donde podrían ser necesarios túneles para proteger rápidamente a los humanos de las tormentas de polvo que se aproximan u otras amenazas. "Si fueras un enjambre de robots en Marte y necesitaras cavar profundamente a toda prisa para alejarte de las tormentas de polvo, esta estrategia podría ayudar a proporcionar refugio sin tener información perfecta sobre lo que todos estaban haciendo, "Explicó Goldman.
Más allá de las posibles aplicaciones robóticas, el trabajo proporciona información sobre las complejas habilidades sociales de las hormigas y contribuye a la comprensión de la materia activa.
"Las hormigas que viven en entornos subterráneos complejos tienen que desarrollar reglas sociales sofisticadas para evitar las cosas malas que pueden suceder cuando hay muchas personas en un entorno abarrotado, ", Dijo Goldman." También estamos contribuyendo a comprender la física de la materia activa orientada a tareas, poner más conocimiento experimental en fenómenos como enjambres ".