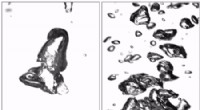
Al comparar las reacciones de natación del pez cebra (la presa) con el tigre rojo Oscar (el depredador, se muestra arriba) contra las reacciones del pez cebra cuando se enfrenta a un robot que se veía y nadaba como si fuera real, Los investigadores de NYU Tandon concluyeron que combinar las técnicas de investigación de la robótica con la teoría de la información avanzará en la comprensión de las interacciones depredador-presa. Crédito:Universidad de Nueva York
Con la ayuda de peces robóticos, Los investigadores de la Escuela de Ingeniería Tandon de la Universidad de Nueva York están demostrando cómo la teoría de la información puede ofrecer información sobre las relaciones de causa y efecto entre depredadores y presas en el reino animal.
En un artículo publicado en el Instituto Americano de Física ' Caos:una revista interdisciplinaria de ciencia no lineal , el equipo de investigación dirigido por Maurizio Porfiri, profesor de ingeniería mecánica y aeroespacial en NYU Tandon, validó el uso de la teoría de la información para estudiar las interacciones depredador-presa. Mediante el uso de peces robóticos, la investigación proporciona una base para experimentos controlados de causalidad dentro de tales interacciones.
"En un contexto de dos entidades, el depredador y la presa, que buscan resultados completamente diferentes, La robótica nos proporciona una herramienta para validar el concepto de entropía de transferencia para descubrir relaciones de causa y efecto y responder a ciertas preguntas biológicas. ", Dijo Porfiri." La pregunta que queremos entender en última instancia es:si juntamos un depredador y su presa, ¿Cómo se influyen entre sí? ¿Cómo cambia el comportamiento del depredador debido a la presencia de la presa? y ¿cómo cambia la presencia del depredador la respuesta de la presa? "
La entropía de transferencia examina la transferencia de información entre dos entidades y se ha aplicado ampliamente en campos como la neurociencia y la economía. pero solo recientemente está emergiendo como una herramienta para estudiar el comportamiento animal. La investigación detallada en el documento explora cómo una combinación de robótica y entropía de transferencia puede ofrecer una nueva perspectiva del análisis de las interacciones depredador-presa y mejorar nuestra comprensión del miedo y la ansiedad.
El papel, "La teoría de la información y la robótica se encuentran para estudiar las interacciones depredador-presa, "fue escrito por Porfiri, Investigador invitado y autor principal Daniele Neri, Tommaso Ruberto, director de laboratorio de sistemas dinámicos de NYU Tandon y científico investigador, y la investigadora de pregrado de Tandon, Gabrielle Cord-Cruz.
Los ingenieros de NYU Tandon crearon un robot biomimético que parecía y nadaba como un verdadero Oscar tigre rojo. Crédito:Universidad de Nueva York
En experimentos anteriores, Porfiri y otros investigadores demostraron la validez de los estímulos robóticos para experimentos sobre el comportamiento animal, mostrando que el pez cebra exhibió una respuesta equivalente a las réplicas tanto en vivo como robóticas de otros peces cebra y depredadores.
Su plataforma basada en robótica permite manipular y controlar con precisión las interacciones mejor de lo que es posible cuando se utilizan solo animales vivos. En el caso de sus últimos experimentos, el equipo expuso presas vivas, el pez cebra, tanto a un oscar tigre rojo vivo como a una versión tridimensional del pez depredador. El pez cebra nadaba libremente dentro de una configuración similar a una arena alrededor del depredador real y robótico, que en ambos casos estaba confinado a la mitad del tanque. El robot viajó en una trayectoria dinámica y personalizable que fue preprogramada para imitar los movimientos depredadores típicos de los peces vivos para incitar una respuesta dentro del pez cebra.
Los investigadores rastrearon las respuestas del pez cebra tanto a la réplica como al depredador vivo. Al provocar una respuesta de miedo controlada dentro del pez cebra a partir del estímulo robótico, La investigación demostró cómo la transferencia de entropía puede aislar la relación de causa y efecto unidireccional entre una réplica robótica y el pez cebra. Por otra parte, experimentando con depredadores vivos, encontraron una interacción bidireccional entre el pez cebra y el depredador, en el que cada uno influía en el comportamiento del otro.
Otros desarrollos de su innovadora plataforma robótica incluyeron la ingeniería del depredador robótico para que reaccionara a los movimientos del pez cebra en tiempo real para experimentos futuros. Esto permitirá a los investigadores manipular aún más la interacción entre el depredador robótico y el pez cebra de modo que el pez cebra cause el comportamiento del depredador.
Porfiri y su equipo dijeron que esperan que los estudios futuros revelen más sobre cómo los animales se comunican entre sí. así como proporcionar información sobre los aspectos evolutivos del comportamiento social y qué determinantes provocan respuestas relacionadas con el miedo y la ansiedad entre el pez cebra e incluso otros animales, incluidos los humanos.