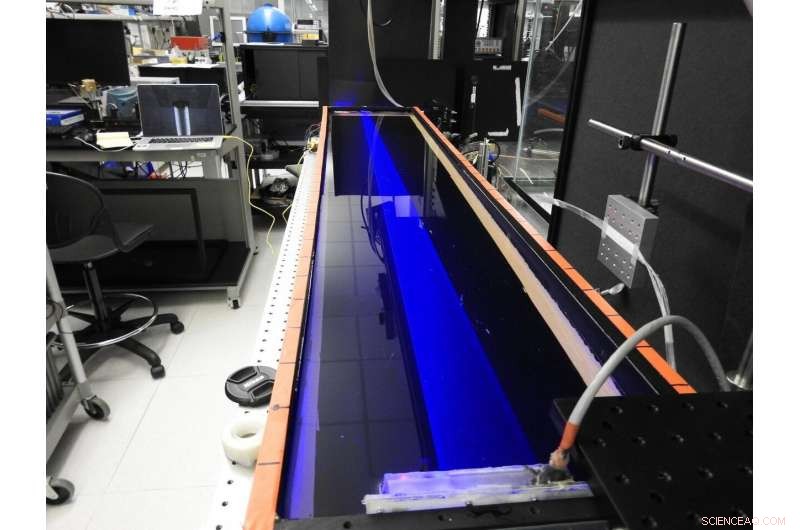
Se utilizó una configuración experimental de 1,5 metros de largo para probar la efectividad de un sensor de temperatura sumergido para cargar y transmitir instrucciones a un panel solar. Crédito:2020 Filho et al.
En KAUST se está desarrollando un sistema que puede transmitir simultáneamente luz y energía a dispositivos de energía submarina. El Internet de objetos subacuáticos autoalimentado (IoUT) que recolecta energía y decodifica la información transferida por haces de luz puede mejorar la detección y la comunicación en los mares y océanos. Los investigadores de KAUST ahora están resolviendo algunos de los muchos desafíos a los que se enfrenta esta tecnología que se emplea en entornos tan duros y dinámicos.
"Las comunicaciones subacuáticas acústicas y por ondas de radio ya están en uso, pero ambos tienen enormes inconvenientes. La comunicación acústica se puede utilizar a grandes distancias, pero carece de sigilo (lo que la hace detectable por un tercero) y solo puede acceder a un pequeño ancho de banda. "explica el alumno de maestría José Filho." Además, las ondas de radio pierden su energía en el agua de mar, lo que limita su uso en profundidades someras. También requieren equipos voluminosos y mucha energía para funcionar. " el explica.
"La comunicación óptica submarina proporciona un ancho de banda enorme y es útil para transmitir información de forma fiable a varios metros, "dice el co-primer autor Abderrahmen Trichili." KAUST ha realizado algunas de las primeras pruebas de comunicación submarina de alta tasa de bits, estableciendo récords en la distancia y capacidad de transmisión submarina en 2015 ".
Dirigido por Khaled Salama, Filho, Trichili y su equipo están investigando el uso de configuraciones de transferencia de energía e información de ondas de luz simultáneas (SLIPT) para transmitir energía y datos a dispositivos electrónicos submarinos.
"SLIPT puede ayudar a cargar dispositivos en lugares inaccesibles donde la alimentación continua es costosa o no es posible, "explica Filho.
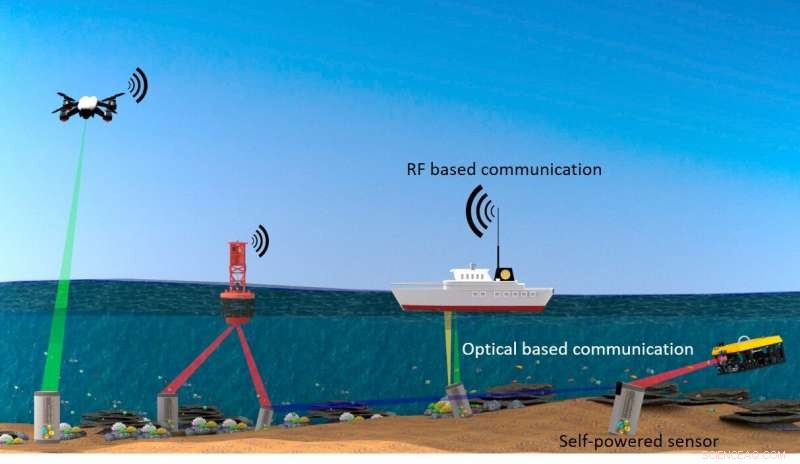
Dispositivos de Internet de objetos subacuáticos autoalimentados en un entorno submarino que utilizan láseres para comunicarse y obtener energía de un vehículo aéreo no tripulado, una boya estacionaria, un bote y un vehículo submarino operado por control remoto. Crédito:© 2020 Jose Filho
En un experimento, El equipo de KAUST pudo cargar y transmitir instrucciones a través de un tanque de agua de 1,5 metros de largo a un panel solar en un sensor de temperatura sumergido. El sensor registró los datos de temperatura y los guardó en una tarjeta de memoria, luego transmitiéndolo a un receptor cuando la información en el haz de luz le indicó que lo hiciera.
En otro experimento, la batería de una cámara sumergida en el fondo de un tanque alimentado con agua del Mar Rojo se cargó a través de su panel solar en una hora y media mediante un tanque parcialmente sumergido, Fuente láser alimentada externamente. La cámara completamente cargada pudo transmitir videos de un minuto de duración al transmisor láser.
"Estas demostraciones fueron los primeros dispositivos independientes para recolectar energía, decodificar información y realizar una función particular, en este caso detección de temperatura y transmisión de video, "dice Salama.
El equipo de KAUST ahora está trabajando en el despliegue de configuraciones SLIP submarinas. Están encontrando formas de superar los efectos de la turbulencia en la recepción bajo el agua y están estudiando el uso de la luz ultravioleta para las transmisiones que enfrentan obstrucciones bajo el agua. También están desarrollando algoritmos inteligentes de posicionamiento óptico submarino que podrían ayudar a localizar dispositivos de retransmisión configurados para ampliar los rangos de comunicación de los dispositivos IoUT.
La investigación de ellos y de otros en el campo podría finalmente conducir al despliegue de sensores submarinos autoamplificados para rastrear los efectos del cambio climático en los arrecifes de coral. detección de actividad sísmica y seguimiento de oleoductos. También podría conducir al desarrollo de pequeños robots autónomos para operaciones de búsqueda y rescate submarinas más precisas y extensas.