Crédito:arXiv:2002.08550 [cs.RO]
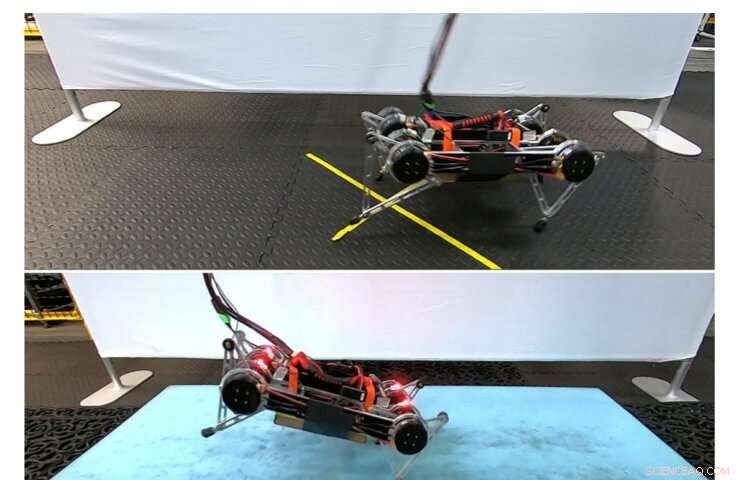
El campo de la robótica dio un paso adelante, seguido de otro, luego varios más, cuando un robot llamado Rainbow Dash recientemente aprendió a caminar por sí solo. La máquina de cuatro patas solo requirió unas pocas horas para aprender a caminar hacia atrás y hacia adelante, y gire a la derecha y a la izquierda mientras lo hace.
Investigadores de Google, UC Berkeley y el Instituto de Tecnología de Georgia publicaron un artículo sobre el servidor de preimpresión ArXiv que describe una técnica de inteligencia artificial estadística conocida como aprendizaje por refuerzo profundo que utilizaron para producir este logro. lo cual es significativo por varias razones.
La mayoría de las implementaciones de aprendizaje por refuerzo tienen lugar en entornos simulados por computadora. Rainbow Dash, sin embargo, utilizó esta tecnología para aprender a caminar en un entorno físico real.
Es más, pudo hacerlo sin un mecanismo de enseñanza dedicado, como instructores humanos o datos de entrenamiento etiquetados. Finalmente, Rainbow Dash logró caminar sobre múltiples superficies, incluyendo un colchón de espuma suave y un felpudo con huecos bastante notables.
Las técnicas de aprendizaje por refuerzo profundo que utilizó el robot comprenden un tipo de aprendizaje automático en el que un agente interactúa con un entorno para aprender por ensayo y error. La mayoría de los casos de uso del aprendizaje por refuerzo involucran juegos computarizados en los que los agentes digitales aprenden a jugar para ganar.
Esta forma de aprendizaje automático es marcadamente diferente del aprendizaje tradicional supervisado o no supervisado, en el que los modelos de aprendizaje automático requieren datos de entrenamiento etiquetados para aprender. El aprendizaje por refuerzo profundo combina enfoques de aprendizaje por refuerzo con aprendizaje profundo, en el que la escala del aprendizaje automático tradicional se amplía enormemente con una potencia computacional masiva.
Aunque el equipo de investigación le dio crédito a Rainbow Dash por haber aprendido a caminar, La intervención humana aún desempeñaba un papel importante en la consecución de ese objetivo. Los investigadores tuvieron que crear límites dentro de los cuales el robot aprendiera a caminar para evitar que abandonara el área.
También tuvieron que idear algoritmos específicos para evitar que el robot se cayera, algunos de los cuales se enfocaron en restringir el movimiento del robot. Para evitar accidentes como daños por caídas, El aprendizaje por refuerzo robótico generalmente tiene lugar en un entorno digital antes de que los algoritmos se transfieran a un robot físico para preservar su seguridad.
El triunfo de Rainbow Dash tiene lugar aproximadamente un año después de que los investigadores inicialmente descubrieron cómo hacer que los robots aprendan en física, a diferencia de virtual, alrededores.
Chelsea Finn, un profesor asistente de Stanford asociado con Google que no participó en la investigación, dice, "Sacar a la persona del proceso [de aprendizaje] es realmente difícil. Al permitir que los robots aprendan de forma más autónoma, los robots están más cerca de poder aprender en el mundo real en el que vivimos ".
© 2020 Science X Network