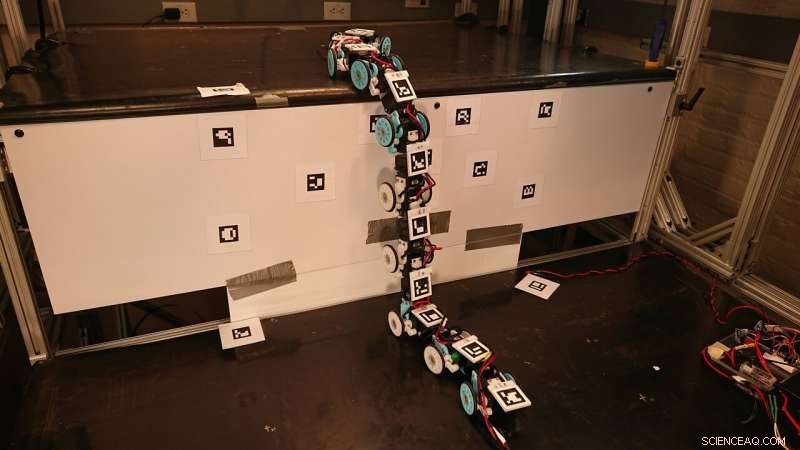
El Laboratorio de Terradinámica de la Universidad Johns Hopkins creó este robot serpiente para imitar a su homólogo animal. Crédito:JHU / Will Kirk
Las serpientes viven en diversos entornos que van desde desiertos insoportablemente calurosos hasta exuberantes bosques tropicales, donde se deslizan por los árboles, rocas y arbustos todos los días. Al estudiar cómo se mueven estas serpientes, Los ingenieros de Johns Hopkins han creado un robot serpiente que puede subir grandes escalones de manera ágil y estable.
Los nuevos hallazgos del equipo, publicado en Revista de biología experimental y Ciencia Abierta de la Royal Society , avanzar en la creación de robots de búsqueda y rescate que puedan navegar con éxito en terrenos traicioneros.
"Buscamos a estas espeluznantes criaturas en busca de inspiración para el movimiento porque ya son muy hábiles para escalar obstáculos de manera estable en su vida cotidiana. Con suerte, nuestro robot puede aprender a mecerse y tejer a través de superficies como serpientes, "dice Chen Li, profesor asistente de ingeniería mecánica en la Universidad Johns Hopkins y autor principal de los artículos.
Estudios anteriores habían observado principalmente movimientos de serpientes en superficies planas, pero rara vez en terreno 3-D excepto en árboles, dice Li, y no tenga en cuenta los grandes obstáculos de la vida real, como escombros y escombros, que los robots de búsqueda y rescate tendrían que superar.
El equipo de Li estudió primero cómo la variable kingsnake, una serpiente que comúnmente se puede encontrar viviendo tanto en desiertos como en bosques de pinos y robles, subió escalones en el laboratorio de terradynamics de Li. El laboratorio de Li fusiona los campos de la robótica, biología y física juntas para estudiar los movimientos de los animales en busca de consejos y trucos para construir robots más versátiles.
"Estas serpientes tienen que viajar con regularidad a través de rocas y árboles caídos; son las maestras del movimiento y hay mucho que podemos aprender de ellas". "dice Li.
Li y su equipo realizaron una serie de experimentos, cambiando la altura del escalón y la fricción de la superficie de los escalones para observar cómo las serpientes contorsionan sus cuerpos en respuesta a estas barreras.
Descubrieron que las serpientes dividían sus cuerpos en tres secciones:su cuerpo delantero y trasero se movía hacia adelante y hacia atrás en los escalones horizontales como una ola, mientras que la sección media del cuerpo permanecía rígida. flotando así, para salvar el gran paso. Las porciones que se retuercen, se dieron cuenta, proporcionó estabilidad para evitar que la serpiente se volcara.
A medida que las serpientes se acercaban y subían al escalón, las tres secciones del cuerpo viajaron por cada segmento del cuerpo. A medida que más y más serpientes llegaban al escalón, su sección delantera de la carrocería se alargaría y su sección trasera se acortaría mientras que la sección media de la carrocería se mantendría aproximadamente con la misma longitud, suspendido verticalmente sobre los dos escalones.
Si los escalones se hicieran más altos y resbaladizos, las serpientes se moverían más lentamente y moverían menos su cuerpo delantero y trasero para mantener la estabilidad.
Después de analizar sus videos y observar cómo las serpientes subían escalones en el laboratorio, Qiyuan Fu, un estudiante de posgrado en el laboratorio de Li, creó un robot para imitar los movimientos de los animales.
En primer lugar, la serpiente robot tenía dificultades para mantenerse estable en grandes escalones y, a menudo, se tambaleaba y volcaba o se atascaba en los escalones. Para abordar estos problemas, los investigadores insertaron un sistema de suspensión (como el de su automóvil) en cada segmento de la carrocería para que pudiera comprimirse contra la superficie cuando fuera necesario. Después de este, el robot serpiente estaba menos tambaleante, más estable y subió escalones tan altos como el 38% de su longitud corporal con una tasa de éxito de casi el 100%.
En comparación con los robots serpiente de otros estudios, El robot serpiente de Li era más rápido y estable que todos menos uno, e incluso estuvo cerca de imitar la velocidad real de la serpiente. Una desventaja del sistema de suspensión de carrocería agregado, sin embargo, Fue el robot que utilizó más electricidad.
"El animal sigue siendo mucho más superior, pero estos resultados son prometedores para el campo de los robots que pueden atravesar grandes obstáculos, "agrega Li.
Próximo, el equipo probará y mejorará el robot serpiente para terrenos en 3D aún más complejos con más obstáculos grandes no estructurados.














