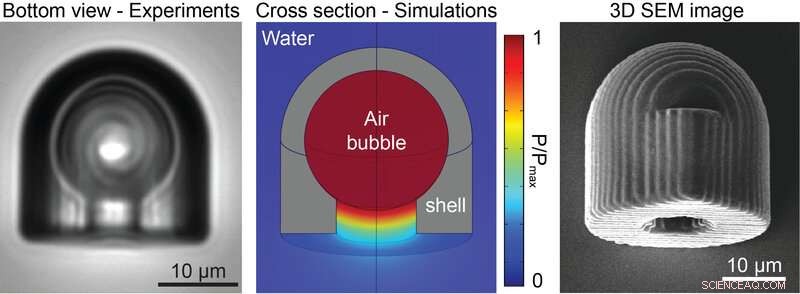
Figura 1. Imagen de microscopía del microrobot accionado acústicamente con una burbuja de aire esférica atrapada dentro de su cuerpo (izquierda); Campo de presión acústica alrededor del microrobot predicho por las simulaciones numéricas (centro); Imagen de microscopía electrónica de barrido del microrobot impreso en tres dimensiones con una aleta afilada en la parte superior (derecha). Crédito:Instituto Max Planck de Sistemas Inteligentes de Stuttgart
Investigadores del Instituto Max Planck de Sistemas Inteligentes en Stuttgart han diseñado y fabricado un microrobot sin ataduras que puede deslizarse a lo largo de una superficie plana o curva en un líquido cuando se expone a ondas de ultrasonido. Su fuerza de propulsión es de dos a tres órdenes de magnitud más fuerte que la fuerza de propulsión de microorganismos naturales como bacterias o algas. Adicionalmente, puede transportar carga mientras nada. Por tanto, el robot de propulsión acústica tiene un potencial significativo para revolucionar el futuro tratamiento mínimamente invasivo de los pacientes.
Stuttgart:investigadores del Instituto Max Planck de Sistemas Inteligentes (MPI-IS) de Stuttgart desarrollaron un robot sintético en miniatura con un diámetro de 25 micrómetros, que se impulsa acústicamente hacia adelante:una bala a gran velocidad, en el verdadero sentido de la palabra. Menos del diámetro de un cabello humano en tamaño, nunca antes un microrobot tan accionado había alcanzado esta velocidad. Su diseño inteligente es tan eficiente que incluso supera las capacidades de natación de los microorganismos naturales.
Los científicos diseñaron el microrobot de polímero impreso en 3D con una cavidad esférica y una pequeña boquilla en forma de tubo hacia la parte inferior (ver figura 1). Rodeado de líquido como el agua, la cavidad atrapa una burbuja de aire esférica. Una vez que el robot está expuesto a ondas acústicas de alrededor de 330 kHz, la burbuja de aire pulsa, empujando el líquido dentro del tubo hacia el extremo posterior del microrobot. El movimiento del líquido luego impulsa la bala hacia adelante con bastante fuerza, hasta 90 longitudes corporales por segundo. Esa es una fuerza de empuje de dos a tres órdenes de magnitud más fuerte que la de los microorganismos naturales como las algas o las bacterias. Ambos se encuentran entre los micro nadadores más eficientes de la naturaleza, optimizado por la evolución.
La implementación de ondas de ultrasonido para activar microrobots no es un enfoque nuevo. Sin embargo, Los robots anteriores con capacidad para nadar han demostrado ser relativamente lentos, difícil de controlar cerca de superficies, y han tenido un tiempo de funcionamiento relativamente corto de sólo unos minutos. Todos estos factores son obstáculos para su uso en aplicaciones médicas para la administración de fármacos dirigida, desintoxicación, o cirugías no invasivas. Los científicos del Departamento de Inteligencia Física del MPI-IS, Dr. Amirreza Aghakhani, Oncay Yasa, Paul Wrede, y el Dr. Metin Sitti, quien es el director del departamento, pudieron ajustar las capacidades de dirección de su robot mientras aumentaban el tiempo de funcionamiento a varias horas. Su publicación "Microrobots móviles de deslizamiento de superficie accionados acústicamente" se publicó en el procedimientos de la Academia Nacional de Ciencias en febrero de 2020.
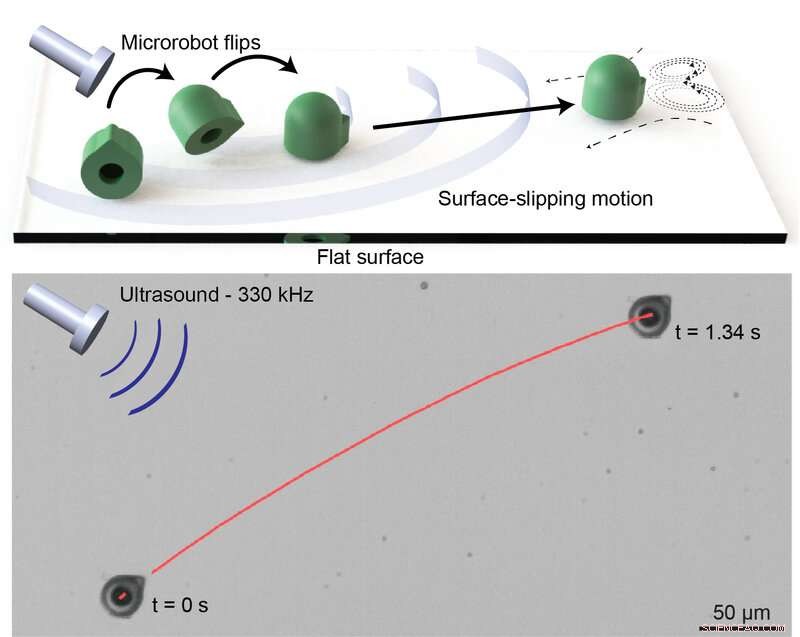
Figura 2. Esquema de un microrobot que se desliza en la superficie bajo energía de ultrasonidos (arriba); Imagen de lapso de tiempo del microbot en movimiento sobre un sustrato a una excitación acústica de 330 kHz (abajo). Crédito:Instituto Max Planck de Sistemas Inteligentes de Stuttgart
Además de diseñar el robot con una cavidad interior que atrapa una burbuja de aire esférica con una pequeña abertura, agregaron una pequeña aleta a la superficie del cuerpo cilíndrico del microrobot (ver figura 2), que sesga la dirección de propulsión. También recubrieron la parte superior de la bala de polímero con una capa de nanofilm magnética suave. Con la ayuda de los campos magnéticos externos circundantes, luego pudieron alterar la dirección de la bala hacia la izquierda o hacia la derecha, así como hacia arriba o hacia abajo.
En varios experimentos, Los investigadores probaron qué tan capaz es su robot de moverse en diferentes superficies dentro de un microcanal similar a un vaso sanguíneo. Expusieron el robot a ondas acústicas y un campo magnético y lograron navegarlo en este espacio tridimensional confinado. También demostraron que la captura de la carga ocurre automáticamente mientras el microrobot se mueve. Mientras el líquido sale de la cavidad del robot cuando se expone a ondas de ultrasonido, se genera un patrón circular de microcorriente hacia la parte inferior (ver figura 2). Esta corriente asegura que las partículas de fármaco circundantes sean guiadas hacia el robot. Allí, las partículas se acumulan y se transportan con el movimiento del robot. Gracias a esto, el robot podría aplicarse algún día para recolectar partículas de medicamentos contra el cáncer dentro del torrente sanguíneo y transportar específicamente el medicamento hacia un carcinoma, soltar la carga a corta distancia para un impacto máximo.
Dr. Amirreza Aghakhani, investigador postdoctoral en el Departamento de Inteligencia Física y coautor principal de la publicación, resume las características especiales del microrobot:"Podemos activar nuestros microrobots de manera muy eficiente, y también son muy rápidos. El ultrasonido es inofensivo para el cuerpo y puede penetrar en regiones profundas del cuerpo. Podemos mover estos robots en superficies planas y curvas de manera controlada y podemos adjuntar diferentes cargas, como las drogas. Esto es impresionante ".
Otro beneficio son las imágenes por ultrasonido. Dentro del cuerpo, la obtención de imágenes es un gran desafío cuando el robot tiene solo varios micrómetros de tamaño. "Sin embargo, la burbuja de aire atrapada puede actuar como agente de contraste, hacer que el robot y su ubicación sean más visibles, "Agrega el Dr. Aghakhani.
"Nuestra visión es desplegar tales microrobots accionados acústicamente y dirigidos magnéticamente dentro del cuerpo humano para diversas aplicaciones médicas no invasivas en un futuro próximo, "Concluye el Dr. Metin Sitti.