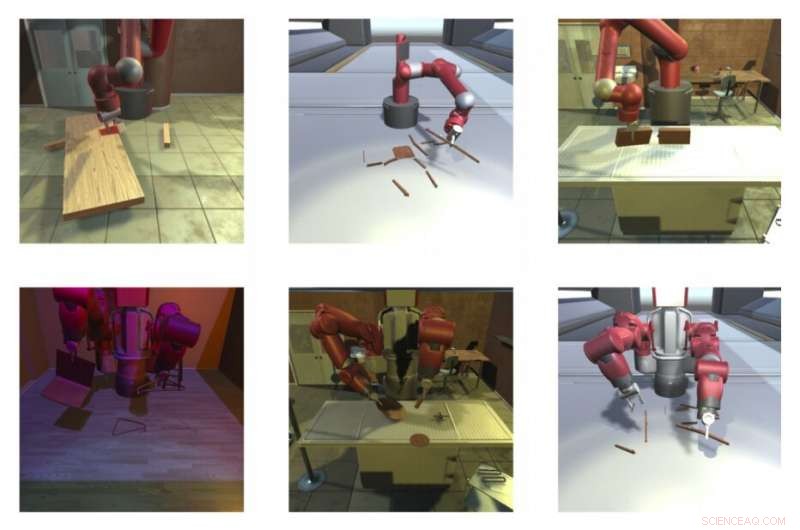
Capturas de pantalla del entorno de montaje de muebles de IKEA. Crédito:Lee et al.
Para completar tareas cotidianas complejas como el uso de equipos, cocinar o construir muebles, los robots deberían poder planificar sus acciones y manipular objetos en su entorno. Hasta aquí, sin embargo, enseñar a los robots a completar tareas complicadas, como los que requieren planificación durante un período de tiempo considerable, ha demostrado ser bastante desafiante, también debido a la falta de entornos simulados confiables para probarlos.
Teniendo esto en cuenta, investigadores de la Universidad de Carolina del Sur han desarrollado recientemente el entorno de montaje de muebles de IKEA, una plataforma de simulación donde los investigadores pueden probar agentes de inteligencia artificial (IA) en tareas de manipulación complejas. En el medio ambiente que desarrollaron, presentado en un artículo prepublicado en arXiv, Los agentes pueden ser evaluados en una variedad de tareas de manipulación que involucran la construcción y manipulación de diferentes elementos de mobiliario.
"El entorno está diseñado para avanzar en el aprendizaje por refuerzo desde tareas simples de juguete hasta tareas complejas que requieren una planificación a largo plazo y un control sofisticado de bajo nivel, "escribieron los investigadores en su artículo.
Montar muebles puede ser una tarea desafiante incluso para los humanos, ya que normalmente requiere tanto una planificación a largo plazo como habilidades de manipulación sofisticadas. El entorno desarrollado por los investigadores, que es bastante fácil de usar, tiene varias funciones interesantes. Como genera una gran cantidad de datos etiquetados sintéticos, se puede utilizar para entrenar modelos de visión por computadora en una amplia gama de tareas, incluida la estimación de la postura del objeto, comprensión de la escena, y muchos más, sin requerir datos anotados por humanos.
Además, el entorno podría servir como punto de referencia para los métodos de aprendizaje automático diseñados para el montaje de muebles u otras tareas de manipulación a largo plazo, mejorando sus capacidades de control y planificación. Curiosamente, los datos visuales e interactivos producidos por la plataforma también se pueden utilizar para adquirir conocimientos específicos del dominio para otras aplicaciones, como los modelos físicos intuitivos.
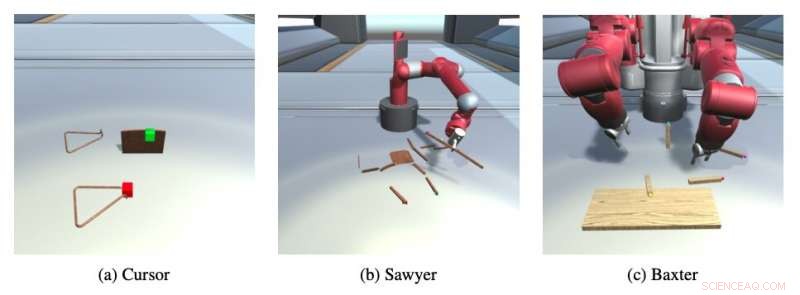
Los tres robots actualmente soportados por la plataforma. Crédito:Lee et al.
El entorno de montaje de muebles de IKEA admite más de 80 modelos de muebles y se puede personalizar con imágenes de fondo, iluminación y texturas. En última instancia, podría verse como un banco de pruebas para técnicas de aprendizaje automático diseñadas para brindar a los robots habilidades avanzadas de manipulación de objetos.
Hasta aquí, el entorno se puede utilizar para entrenar o probar tres robots de diferentes formas y tamaños, llamado Cursor, Sawyer y Baxter. En la próxima actualización, sin embargo, los investigadores también planean agregar soporte para Fetch, UR, Jaco y otros robots populares.
En el futuro, Este entorno personalizable podría abrir nuevas posibilidades para entrenar y evaluar numerosas técnicas de aprendizaje automático para aplicaciones robóticas. Mientras tanto, los investigadores planean actualizar la plataforma y mejorar algunas de sus funciones.
Por ejemplo, les gustaría agregar soporte para dispositivos de movimiento 3-D, permitiendo a los usuarios operar robots de forma remota y crear videos de demostración usando un controlador VR o un mouse 3-D. Estos videos de demostración podrían usarse para entrenar modelos de aprendizaje automático, utilizando una estrategia conocida como aprendizaje por imitación.
En futuras versiones de la plataforma, los usuarios también podrían guiar a los robots mediante instrucciones habladas, e incluso podría capacitar a varios agentes simultáneamente. Es más, los robots podrían eventualmente ser entrenados sobre cómo usar herramientas específicas, como destornilladores y martillos.
© 2019 Science X Network