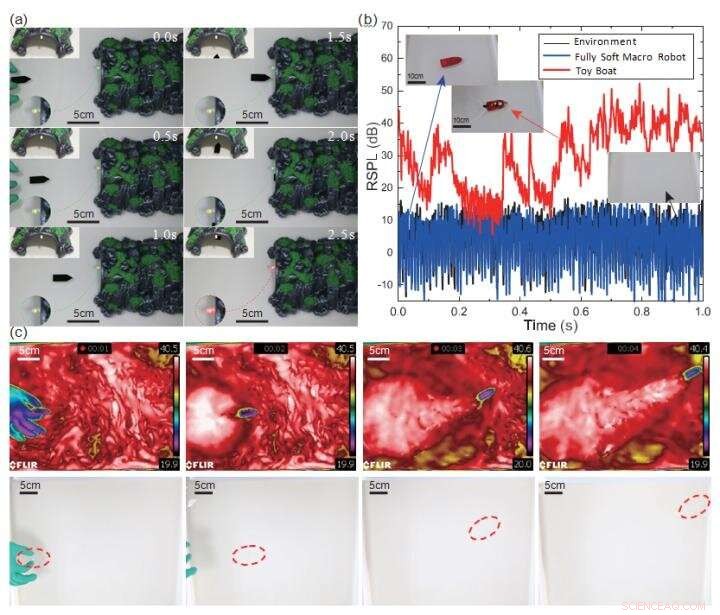
(a) Fotografías de un robot apuntando a una trayectoria indicada por LED. La demostración de orientación muestra la precisión que puede lograr el control del robot. (b) Comparación del nivel de ruido relativo medido de un macro robot blando y uno alimentado por batería, barco de juguete de tamaño similar. RSPL denota el nivel de presión sonora relativo. El robot presenta un nivel de ruido mucho menor en comparación con el bote de juguete. (c) Fotografías de un robot frío moviéndose en agua tibia tomadas con una cámara de video infrarroja y una cámara normal, respectivamente. Crédito:© Science China Press
Los robots blandos han ganado mucha atención en los últimos años por sus características únicas en comparación con los robots rígidos tradicionales. Sin embargo, a diferencia del Baymax de la película "Big Hero 6, "El robot blando de última generación es solo un prototipo en los laboratorios, generalmente atado, lo que significa que requiere un cable eléctrico o tubería neumática para alimentar. Para aprovechar todo el potencial de los robots blandos, Se prefiere el diseño sin ataduras. Los enfoques existentes para equipar los robots blandos con un diseño sin ataduras generalmente involucran fuentes de energía de alta densidad de energía, que conduce a problemas de integración, de lo contrario, el robot será voluminoso y torpe para transportar fuentes de energía de baja densidad de energía.
En la naturaleza hay criaturas enormes que han evolucionado durante miles de millones de años para sobrevivir. Escarabajos errantes del género Stenus, un tipo de insectos terrestres vive alrededor de estanques o arroyos, ganarían un estallido de energía cinética para escapar cuando cayeran accidentalmente al agua, secretando sustancias químicas para generar un gradiente de energía superficial. Un proceso tan propulsor, comúnmente conocido como propulsión Marangoni, fue adoptado por criaturas vivas, así que fue suave y gentil, Totalmente compatible con materiales blandos.
En un nuevo artículo de investigación publicado en Beijing, Revista Nacional de Ciencias , Los científicos de la Universidad de Ciencia y Tecnología de Huazhong informan sobre un robot totalmente blando sin ataduras en líquido cuya actuación emplea gradientes de energía ambiental. Al liberar materiales ambientalmente activos (EAM) al ambiente líquido, el robot podría ganar una velocidad ágil de 5,5 longitudes de cuerpo por segundo, que es 7 veces más alto que el mejor valor reportado en el pez robótico blando sin ataduras.
"Se obtienen algunas ventajas al adoptar un mecanismo de este tipo, como la tranquilidad, sin fatiga térmica, etc. ", dijo el profesor Zhigang Wu, "Más importante, la actuación y la realización funcional del robot se pueden complementar por separado. El diseñador, por primera vez, gana la oportunidad de centrarse en la realización de la función. Esto podría habilitar el robot blando en algunos escenarios intactos en el futuro ".