El dispositivo SensFoot. Crédito:Moschetti et al.
Investigadores del Instituto de BioRobotics de la Scuola Superiore Sant "Anna, Co-Robotics srl y Sheffield Hallam University han propuesto recientemente un nuevo enfoque para mejorar las interacciones entre humanos y robots mientras caminan juntos. Su papel publicado en MDPI's Robótica diario, propone el uso de sensores portátiles como un medio para mejorar la colaboración entre un humano y un robot que se mueven en un entorno compartido.
Los avances tecnológicos recientes han permitido el empleo de robots como asistentes en una amplia gama de situaciones de la vida cotidiana. Para funcionar bien en la mayoría de estos entornos, sin embargo, los robots deberían poder interactuar con los usuarios humanos de forma fluida y eficaz. Por lo tanto, los investigadores han estado desarrollando enfoques y técnicas para mejorar la capacidad de los robots para comprender las señales sociales y responder en consecuencia.
En su estudio, el equipo se centró especialmente en tareas que implican que humanos y robots caminen juntos o realicen una tarea que implique estar de pie y moverse en un entorno compartido. Su objetivo era desarrollar un enfoque que permitiera a los humanos moverse de forma natural en un espacio determinado junto con un robot. sin la necesidad de vínculos físicos entre los dos.
"Este documento propone el uso de unidades de medida inerciales (IMU) portátiles para mejorar la interacción entre el ser humano y el robot mientras caminan juntos sin vínculos físicos y sin restricciones en la posición relativa entre el ser humano y el robot, "escribieron los investigadores en su artículo.
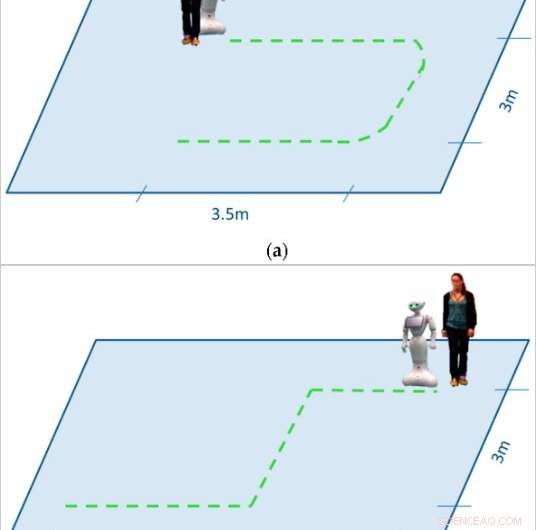
Esquema de la siguiente tarea (a) y tarea de seguimiento (b). Crédito:Moschetti et al.
El enfoque propuesto por los investigadores implica el uso de sensores IMU, que son dispositivos electrónicos que miden e informan la orientación, velocidad y otros datos relacionados con los movimientos, normalmente usando acelerómetros, giroscopios y / o magnetómetros. Estos sensores los usan los humanos (por ejemplo, en sus zapatos) sin causarles molestias, lo que les permite moverse libremente en su espacio circundante.
Las IMU recopilan información en tiempo real sobre los movimientos del usuario humano y los parámetros relacionados con la marcha (por ejemplo, velocidad al caminar, longitud de zancada, ángulo de orientación, etc.). Después, estos datos se procesan y utilizan para dar forma al movimiento del robot, creando en última instancia una interacción más natural entre los dos agentes.
Los investigadores construyeron un prototipo de sistema IMU llamado SensFoot y evaluaron su precisión y eficacia en una serie de experimentos en los que participaron humanos y robots interactuando entre sí. Reclutaron a 19 participantes humanos y les pidieron que completaran dos tareas diferentes, a la que se refieren como una "tarea siguiente" y una tarea "sígueme".
Primero, Verificaron la precisión de su sistema comparando la información de la marcha calculada por un sistema de visión de referencia con la derivada de los datos recopilados por las IMU. Después, probaron los sensores en un escenario real de interacción humano-robot.
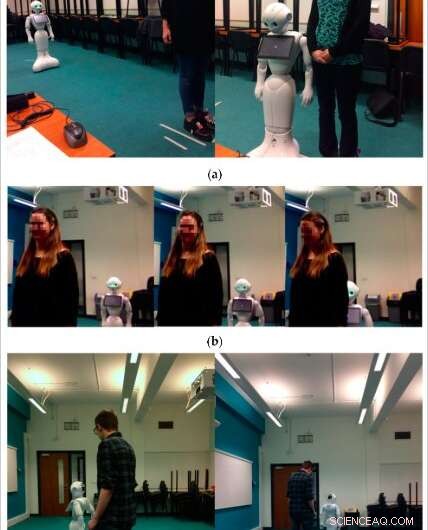
Ejemplo de pruebas con usuarios (a) y secuencias de la siguiente tarea (b) y tarea de seguimiento (c). Crédito:Moschetti et al.
"Experimentamos con 19 participantes humanos en dos tareas diferentes, para proporcionar evaluaciones en tiempo real de los parámetros de la marcha para un robot móvil que se mueve junto con un humano, y estudió la viabilidad y la usabilidad percibida por los participantes, "escribieron los investigadores." Los resultados muestran la viabilidad del sistema, que obtuvo comentarios positivos de los usuarios, dar información valiosa para el desarrollo de un sistema de interacción natural, donde el robot percibe los movimientos humanos por medio de sensores portátiles ".
Las evaluaciones realizadas por los investigadores arrojaron resultados muy prometedores, lo que sugiere que el uso de IMU podría mejorar significativamente las interacciones entre humanos y robots que se mueven por un espacio compartido. Es más, la retroalimentación recopilada de los participantes que probaron los sensores fue abrumadoramente positiva. En el futuro, El enfoque propuesto por los investigadores podría allanar el camino para soluciones de robótica asistida más adaptables y eficientes que involucren la integración de IMU u otros sensores con algoritmos de aprendizaje automático.
"Los trabajos futuros se refieren a la posibilidad de mejorar la percepción del sistema del usuario que camina, mejorar la precisión en los parámetros extraídos, y la adaptabilidad del robot, superando las limitaciones actuales de control e integración, "escribieron los investigadores.
© 2019 Science X Network