Vehículo AutoRally que navega por un bache en la pista a alta velocidad durante la prueba. Crédito:Drews et al.
Investigadores del Instituto de Robótica y Máquinas Inteligentes (IRIM) del Instituto de Tecnología de Georgia han propuesto recientemente un nuevo marco para la conducción agresiva utilizando solo una cámara monocular. Sensores IMU y sensores de velocidad de las ruedas. Su enfoque presentado en un artículo publicado previamente en arXiv, combina la detección de carreteras basada en el aprendizaje profundo, filtros de partículas y control predictivo de modelos (MPC).
"Comprender los casos extremos de la conducción autónoma se está volviendo muy importante, "Paul Drews, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Elegimos una conducción agresiva, ya que es un buen indicador de la prevención o mitigación de colisiones que requieren los vehículos autónomos ".
El término `` conducción agresiva '' se refiere a casos en los que un vehículo terrestre opera cerca de los límites de velocidad de manejo y, a menudo, con ángulos de deslizamiento altos. como se requiere en las carreras de rally. En su trabajo anterior, Los investigadores investigaron la conducción agresiva utilizando GPS de alta calidad para la estimación de la posición global. Este enfoque tiene varias limitaciones, por ejemplo, requiere sensores costosos y excluye áreas sin GPS.
Los investigadores lograron previamente resultados prometedores con una solución de conducción basada en la visión (no basada en GPS), basado en la regresión de un mapa de costos locales a partir de imágenes de cámara monocular y usando esta información para el control basado en MPC. Sin embargo, El tratamiento de cada cuadro de entrada por separado generó desafíos de aprendizaje cruciales debido al campo de visión limitado y al punto de vista bajo de la cámara montada en un vehículo terrestre. lo que dificultó la generación de mapas de costos que fueran efectivos a alta velocidad.

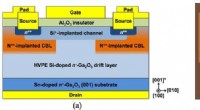
Sistema de diagrama. Crédito:Drews et al.
"Nuestro principal objetivo para este trabajo es comprender cómo se puede utilizar la visión como sensor principal para una conducción agresiva, "Drews dijo." Esto ofrece desafíos interesantes porque el procesamiento visual debe cumplir con estrictos requisitos de tiempo. Esto nos permite explorar algoritmos que están estrechamente relacionados entre la percepción y el control ".
En este nuevo estudio, los investigadores abordaron las limitaciones de su trabajo anterior, presenta un enfoque alternativo para la conducción autónoma de alta velocidad en el que se utiliza un generador de mapas de costos locales en forma de un modelo de red neuronal profunda basado en video (es decir, LSTM) como proceso de medición para un estimador de estado de filtro de partículas.
Esencialmente, el filtro de partículas usa este modelo de observación dinámica para localizar en un mapa esquemático y MPC se usa para conducir agresivamente en base a esta estimación de estado. Este aspecto del marco les permitió obtener una estimación de la posición global contra un mapa esquemático sin utilizar tecnología GPS, al mismo tiempo que mejora la precisión de las predicciones del mapa de costos.
"Adoptamos un enfoque directo de las carreras autónomas al aprender el mapa de costos intermedios directamente a partir de imágenes monoculares, "Drews explicó." Esta representación intermedia se puede utilizar directamente mediante el control predictivo del modelo, o puede ser utilizado por un filtro de partículas para acercarse al rendimiento agresivo basado en el estado del GPS ".
Drews y sus colegas evaluaron su marco utilizando el vehículo de prueba 1:5 en AutoRally, una plataforma de código abierto de conducción autónoma agresiva. Con su acercamiento, Descubrieron que el vehículo podía operar de manera confiable en los límites de fricción en una pista de tierra compleja, alcanzando velocidades superiores a 27 mph (12 m / s).
"Creo que hemos mostrado dos cosas en este estudio, "Dijo Drews." Primero, que al hacer una regresión directa de un mapa de costos a partir de imágenes, podemos usarlo directamente y usarlo para la localización para permitir una conducción agresiva en los límites del manejo. Segundo, que la información temporal es muy importante en un escenario de conducción difícil como este ".
El estudio realizado por Drew y sus colegas demuestra las ventajas de combinar MPC con estimación de estado y percepción aprendida. En el futuro, su marco podría allanar el camino para una conducción autónoma agresiva más robusta y rentable en pistas complejas.
"Ahora nos gustaría mejorar aún más este método con atención aprendida y extenderlo a obstáculos y entornos desconocidos, "Dijo Drews.
© 2018 Science X Network