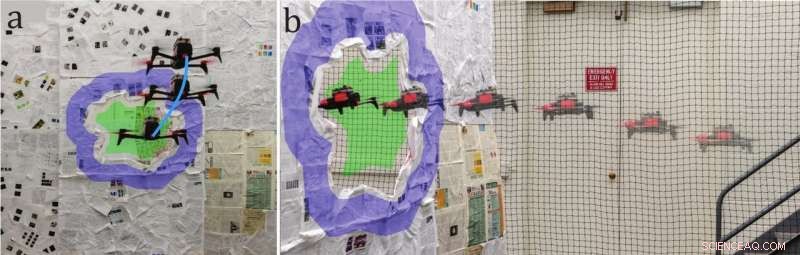
Diferentes partes de la tubería:(a) Detección de la brecha desconocida usando visión activa y algoritmo TS2P (el resaltado cian muestra el camino seguido para obtener múltiples imágenes para la detección), (b) Secuencia del quadrotor que pasa a través del espacio desconocido utilizando un control visual basado en el servo. Los resaltados en azul y verde representan las regiones de primer plano y de fondo rastreadas, respectivamente. Crédito:arXiv:1802.05330 [cs.RO]
Los investigadores han creado un sistema bioinspirado para ayudar a los drones a atravesar pequeños huecos. Los investigadores probaron su sistema y escribieron un análisis en un artículo que se publica en Cartas de robótica y automatización de IEEE .
"GapFlyt:Detección de espacios sin estructura minimalista basada en la visión activa para vuelos en cuadrrotor" es de Nitin J. Sanket, Chahat Deep Singh, Kanishka Ganguly, Cornelia Fermüller y Yiannis Aloimonos. Los autores pertenecen al grupo de Percepción y Robótica de la Universidad de Maryland en College Park.
Trabajaron en un diseño bio-inspirado para quadrotors. Este es un marco diseñado para que los cuadrotores vuelen a través de "huecos desconocidos sin una reconstrucción 3D de la escena, "dijeron, "utilizando sólo una cámara monocular y detección a bordo".
Su intento de notar que todo esto es sin una reconstrucción 3D merece una mirada más cercana. En otra parte, explicaron que "los investigadores y profesionales de hoy utilizan algoritmos tradicionales de visión por computadora con el objetivo de construir una representación de aplicabilidad general:una reconstrucción en 3D de la escena. Usando esta representación, Las tareas de planificación se construyen y realizan para permitir que el quadrotor demuestre un comportamiento autónomo. Estos métodos son ineficientes ya que no se basan en tareas ".
Solo mire los insectos voladores y las aves, resolviendo el problema de la navegación y el control complejo durante siglos por sí mismos, sin la necesidad de construir un mapa 3D, ellos dijeron, y están muy centrados en las tareas.
Evan Ackerman en Espectro IEEE muy bien ofrecido una lección de abejas.
"Las abejas hacen que esto funcione a través de una especie de enfoque minimalista de fuerza bruta del problema:vuelan hasta un pequeño agujero o brecha, flotar, deambular un poco de un lado a otro para recopilar información visual sobre dónde están los bordes del espacio, y luego dirigirse a sí mismos. No es rapido y no es particularmente elegante, pero es confiable y no se necesita mucho para ejecutar ".
El título de su artículo refleja la misma pregunta que plantearon como equipo:"¿Puede un quadrotor atravesar un espacio de forma arbitraria sin construir un modelo 3D explícito de una escena? usando solo una cámara monocular? "
Lo pusieron a prueba en experimentos con diferentes configuraciones y formas de ventanas. El marco propuesto se probó en un quadrotor hobby modificado, Parrot Bebop 2.
Espectro IEEE llevaban un pie de foto que describía con más detalle lo que usaban para los experimentos. El dron modificado, decía la leyenda, incluía un módulo NVIDIA TX2 montado en la parte superior. Para detectar, el dron usó su cámara frontal y un sensor de flujo óptico orientado hacia abajo, que combina una cámara más un sonar.
Resultados? Dijeron que lograron "una tasa de éxito del 85% a 2,5 m / s, incluso con una tolerancia mínima de tan solo 5 cm. "
Espectro IEEE señaló que obtuvieron esa tasa de éxito en más de 150 ensayos "para diferentes ventanas de formas arbitrarias bajo una amplia gama de condiciones que incluye una ventana con una tolerancia mínima de solo 5 cm".
En cuanto a la velocidad máxima que el dron pudo alcanzar al pasar por la brecha, 2,5 m / s, Ackerman dijo que estaba "restringido principalmente por la cámara con obturador rodante (que podría estropear el flujo óptico a velocidades más altas), pero otra vez, este método no está realmente diseñado para drones de alto rendimiento ".
Por qué es importante su trabajo:este documento aborda el problema de la detección de huecos de una forma y ubicación desconocidas con una cámara monocular y detección a bordo. Eso no quiere decir la cuestión de atravesar las lagunas es nueva. Los autores señalaron que "el problema de atravesar brechas ha fascinado a los investigadores desde hace muchos años". Investigadores en otros lugares han presentado algoritmos para la planificación y el control y los autores dijeron que algunos trabajos allanaron el camino hacia el enfoque bioinspirado que utilizaron en el artículo.
© 2018 Tech Xplore