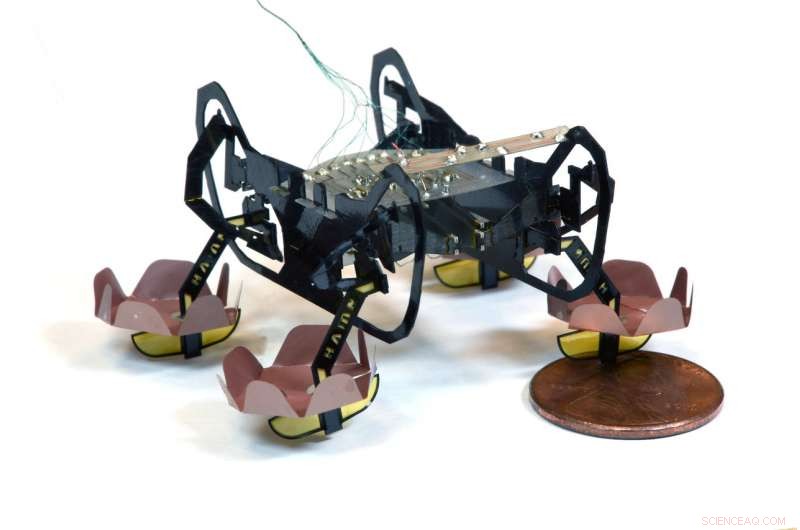
La próxima generación de Microrobot Ambulatorio de Harvard (HAMR) puede caminar sobre la tierra, nadar en la superficie del agua, y caminar bajo el agua, abriendo nuevos entornos para que este pequeño bot explore. Crédito:Yufeng Chen, Neel Doshi, y Benjamin Goldberg / Universidad de Harvard
En naturaleza, las cucarachas pueden sobrevivir bajo el agua hasta por 30 minutos. Ahora, una cucaracha robótica puede hacerlo aún mejor. Microrobot ambulatorio de Harvard, conocido como HAMR, puede caminar sobre la tierra, nadar en la superficie del agua, y caminar bajo el agua todo el tiempo que sea necesario, abriendo nuevos entornos para que este pequeño bot explore.
Este HAMR de próxima generación utiliza almohadillas multifuncionales para los pies que se basan en la tensión superficial y la flotabilidad inducida por la tensión superficial cuando el HAMR necesita nadar, pero también puede aplicar un voltaje para romper la superficie del agua cuando el HAMR necesita hundirse. Este proceso se llama electrohumectación, que es la reducción del ángulo de contacto entre un material y la superficie del agua bajo un voltaje aplicado. Este cambio de ángulo de contacto facilita que los objetos rompan la superficie del agua.
Moverse sobre la superficie del agua permite que un microbot evite los obstáculos sumergidos y reduce la resistencia. Usando cuatro pares de aletas asimétricas y pasos de natación diseñados a medida, Robo-remos HAMR en la superficie del agua para nadar. Aprovechando la interacción inestable entre las aletas pasivas del robot y el agua circundante, el robot genera pasos de natación similares a los de un escarabajo buceador. Esto permite que el robot nade efectivamente hacia adelante y gire.
"Esta investigación demuestra que la microrrobótica puede aprovechar la física a pequeña escala, en este caso la tensión superficial, para realizar funciones y capacidades que son un desafío para los robots más grandes. "dijo Kevin Chen, becario postdoctoral en la Escuela de Ingeniería y Ciencias Aplicadas (SEAS) de Harvard John A. Paulson y primer autor del artículo.

Las almohadillas multifuncionales para los pies de HAMR se basan en la tensión superficial y la flotabilidad inducida por la tensión superficial cuando HAMR necesita nadar, pero también pueden aplicar un voltaje para romper la superficie del agua cuando HAMR necesita hundirse. Crédito:Yufeng Chen, Neel Doshi, y Benjamin Goldberg / Universidad de Harvard
La investigación más reciente se publica en la revista Comunicaciones de la naturaleza .
"El tamaño de HAMR es clave para su rendimiento, "dijo Neel Doshi, estudiante de posgrado en SEAS y coautor del artículo. "Si fuera mucho más grande, Sería un desafío sostener el robot con tensión superficial y si fuera mucho más pequeño, es posible que el robot no pueda generar suficiente fuerza para romperlo ".
HAMR pesa 1,65 gramos (aproximadamente tanto como un clip grande), puede transportar 1,44 gramos de carga útil adicional sin hundirse y puede remar con una frecuencia de hasta 10 Hz. Está recubierto de parileno para evitar que se produzca un cortocircuito bajo el agua.
Una vez debajo de la superficie del agua, HAMR usa el mismo modo de andar para caminar que en tierra firme y es igual de móvil. Para regresar a tierra firme, HAMR enfrenta un enorme desafío desde la bodega del agua. Una fuerza de tensión de la superficie del agua que es el doble del peso del robot empuja al robot hacia abajo, y, además, el par inducido provoca un aumento espectacular de la fricción en las patas traseras del robot. Los investigadores endurecieron la transmisión del robot e instalaron almohadillas blandas en las patas delanteras del robot para aumentar la capacidad de carga útil y redistribuir la fricción durante la escalada. Finalmente, subiendo una modesta pendiente, el robot puede escapar del agua.
"Este robot ilustra muy bien algunos de los desafíos y oportunidades con los robots a pequeña escala, "dijo el autor principal Robert Wood, Profesor Charles River de Ingeniería y Ciencias Aplicadas en SEAS y miembro principal de la facultad del Instituto Harvard Wyss de Ingeniería de Inspiración Biológica. "La contracción brinda oportunidades para una mayor movilidad, como caminar sobre la superficie del agua, pero también desafíos, ya que las fuerzas que damos por sentado a mayor escala pueden comenzar a dominar al tamaño de un insecto".
Próximo, los investigadores esperan mejorar aún más la locomoción de HAMR y encontrar una manera de regresar a tierra sin rampa, quizás incorporando adhesivos inspirados en lagartijas o mecanismos de salto impulsivo.