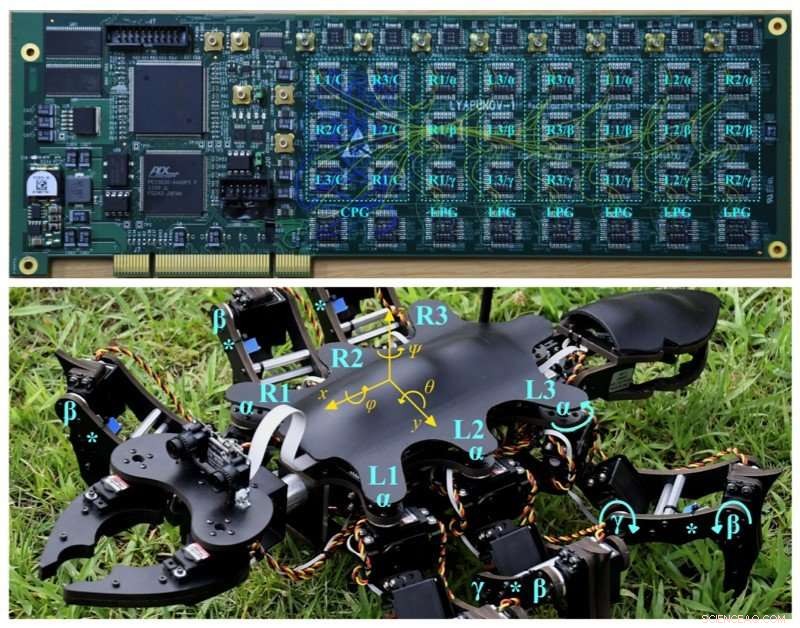
Vistas de la placa de circuito que implementa el controlador y del robot. (Reproducido con permiso del artículo publicado). Crédito:IEEE ACCESS
Un estudio dirigido por investigadores del Instituto de Tecnología de Tokio (Tokyo Tech) ha descubierto nuevas formas de conducir robots de múltiples patas mediante un controlador de dos niveles. El controlador propuesto utiliza una red de los denominados osciladores no lineales que permite la generación de diversas formas de andar y posturas, que se especifican solo con unos pocos parámetros de alto nivel. El estudio inspira una nueva investigación sobre cómo se pueden controlar los robots de múltiples patas, incluyendo en el futuro el uso de interfaces cerebro-computadora.
En el mundo natural muchas especies pueden caminar sobre pendientes y superficies irregulares, llegando a lugares inaccesibles incluso para los robots móviles más avanzados. Sigue siendo un misterio cómo los movimientos complejos son manejados tan perfectamente incluso por las criaturas más pequeñas.
Lo que sí sabemos es que incluso los cerebros más simples contienen circuitos generadores de patrones (CPG), que están conectados específicamente para generar patrones de caminata. Los intentos de replicar tales circuitos artificialmente han tenido hasta ahora un éxito limitado, debido a la poca flexibilidad.
Ahora, investigadores de Japón e Italia proponen un nuevo enfoque para la generación de patrones de marcha, basado en una red jerárquica de osciladores electrónicos dispuestos en dos niveles, que han demostrado usando un robot hexápodo parecido a una hormiga. El logro abre nuevas vías para el control de robots con patas. Publicado en Acceso IEEE , la investigación es el resultado de la colaboración entre científicos de Tokyo Tech, en parte financiado por la Iniciativa World Research Hub, la Academia de Ciencias de Polonia en Cracovia, Polonia, y la Universidad de Catania, Italia.
El controlador de inspiración biológica consta de dos niveles. En la cima, contiene una GPC, responsable de controlar la secuencia general de movimientos de las piernas, conocido como marcha. En el fondo, contiene seis generadores de patrones locales (GLP), responsable de controlar las trayectorias de las piernas individuales.
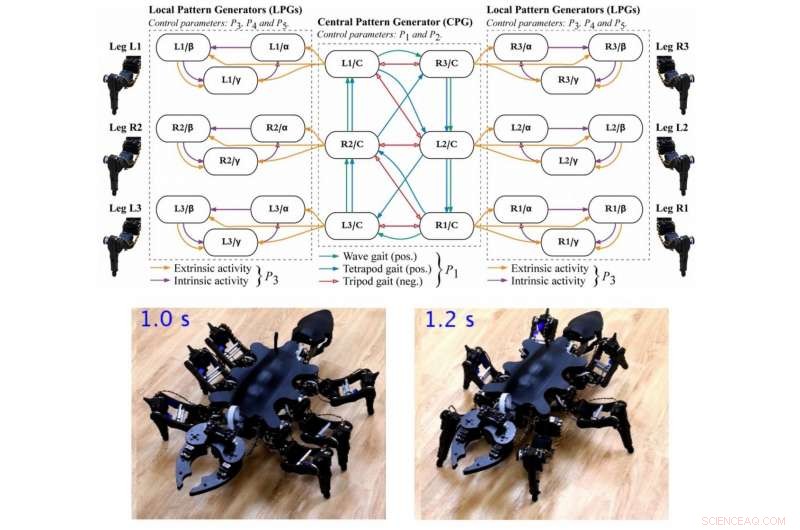
Arriba:Arquitectura del controlador, mostrando el generador de patrones central, que controla el patrón general de la marcha, y a ambos lados, los seis generadores de patrones locales, que controlan las trayectorias de las piernas individuales. Abajo:Imágenes fijas representativas del robot caminando en una postura de hormiga (izquierda) y una postura de cucaracha (derecha). Crédito:IEEE ACCESS
El autor principal del estudio, Ludovico Minati, quien también está afiliado a la Academia Polaca de Ciencias en Cracovia, Polonia e invitado al Instituto de Investigación Innovadora (IIR) de Tokyo Tech a través de la Iniciativa World Research Hub, explica que los insectos pueden adaptar rápidamente su forma de andar dependiendo de una amplia gama de factores, pero particularmente su velocidad al caminar. Algunas marchas se observan con frecuencia y se consideran canónicas, Pero en la realidad, se dispone de un número casi infinito de pasos, y diferentes insectos como hormigas y cucarachas realizan andares similares en posturas muy diferentes.
Se han encontrado dificultades al intentar condensar tanta complejidad en generadores de patrones artificiales. El controlador propuesto muestra un nivel extremadamente alto de versatilidad gracias a la implementación basada en arreglos analógicos programables en campo (FPAA), que permiten la reconfiguración y el ajuste sobre la marcha de todos los parámetros del circuito. Se basa en años de investigación previa sobre redes electrónicas caóticas y no lineales, que ha demostrado su capacidad para replicar fenómenos observados en cerebros biológicos, incluso cuando está cableado en configuraciones muy simples.
"Quizás el momento más emocionante de la investigación fue cuando observamos que el robot exhibía fenómenos y pasos que no habíamos diseñado ni esperado. y más tarde descubrió que también existen en insectos biológicos, ", dice Minati. Estos fenómenos emergentes surgen particularmente cuando la red se realiza con componentes analógicos y permite un cierto grado de autoorganización, representando un enfoque que difiere enormemente de la ingeniería convencional, donde todo está diseñado a-priori y arreglado. "Esto nos acerca mucho más a la forma en que funciona la biología, " él añade.
Yasuharu Koike, también basado en el IIR, comenta:"Un aspecto importante del controlador es que condensa tanta complejidad en sólo una pequeña cantidad de parámetros. Estos pueden considerarse parámetros de alto nivel, en el sentido de que establecen explícitamente el paso, velocidad, postura, etc. Debido a que se pueden cambiar dinámicamente, en el futuro debería ser fácil variarlos en tiempo real utilizando una interfaz cerebro-computadora, permitiendo el control de cinemática compleja que de otro modo sería imposible de dominar con los enfoques actuales ".
Y Natsue Yoshimura, también basado en el IIR, dice:"A medida que el controlador responde gradualmente e incorpora un enfoque biológicamente plausible para la generación de patrones, creemos que puede ser más fluido conducir en comparación con los sistemas que decodifican comandos discretos. Esto puede tener implicaciones prácticas, y nuestro laboratorio tiene un conocimiento sustancial en esta área ".