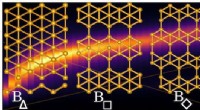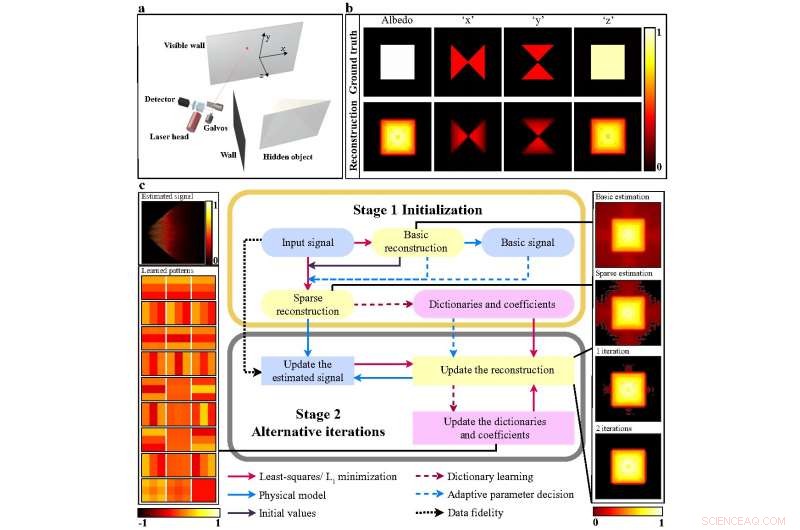
(a), Para reconstruir el objeto invisible, algunas fuentes de luz se utilizan para iluminar una pared visible. Los fotones rebotados del objeto se detectan en varios puntos de la pared visible. (B), Tierra de la verdad y nuestra reconstrucción. La x Los componentes yyz se muestran en sus valores absolutos. (C), Diagrama de flujo del algoritmo. El marco de regularización propuesto incorpora la escasez y la auto-similitud no local del objeto oculto, así como la suavidad de la señal. Se utilizan dos diccionarios ortogonales para capturar las estructuras locales y las correlaciones no locales del objetivo oculto. La señal estimada y los patrones aprendidos del objetivo se muestran a la izquierda. El albedo reconstruido se muestra a la derecha. Crédito:Xintong Liu, Jianyu Wang, Zhupeng Li, Zuoqiang Shi, Xing Fu, Lingyun Qiu
Las imágenes sin línea de visión (NLOS) tienen como objetivo recuperar objetos oscurecidos de múltiples luces dispersas. Recientemente ha recibido una gran atención debido a sus posibles aplicaciones, como la conducción autónoma, operaciones de rescate, y teledetección. En aplicaciones reales, se utilizan láseres u otras fuentes de luz para iluminar una pared visible, la luz dispersa desde la cual alcanza el objeto oculto y se dispersa nuevamente. Los fotones recolectados por los detectores se pueden usar para recuperar la ubicación, forma, albedo, y normal del objetivo. Sin embargo, las mediciones están inevitablemente corrompidas por el ruido, que es uno de los principales obstáculos para obtener reconstrucciones de alta calidad. Cuando el ruido de medición es alto, los objetivos reconstruidos con métodos existentes suelen ser ruidosos con límites borrosos.
En un nuevo artículo publicado en Ciencia y aplicación de la luz , un equipo de científicos, dirigido por el profesor Xing Fu del Departamento de Instrumentos de Precisión, Universidad de Tsinghua, Porcelana, y el profesor Lingyun Qiu del Centro de Ciencias Matemáticas Yau, Universidad de Tsinghua, Porcelana, han desarrollado un marco unificado para reconstrucciones NLOS de alta calidad y resistentes al ruido. La técnica se basa en la regularización colaborativa de la señal y el objeto reconstruido, denominado método de regularización colaborativa señal-objeto (SOCR).
A diferencia de trabajos anteriores que utilizan las mediciones sin procesar como datos de entrada directamente, se introduce una aproximación de la señal ideal en el marco SOCR. El término de regularización diseñado se centra en la escasez y la auto-similitud no local del objeto oculto, así como en la suavidad de la señal estimada. Este marco recientemente desarrollado es poderoso para reconstruir tanto el albedo como la normal de superficie de los objetivos ocultos bajo la configuración general no confocal. Las reconstrucciones obtenidas tienen estructuras locales claras, fronteras definidas, y poco ruido de fondo, incluso en presencia de mucho ruido en las mediciones sin procesar. El método y la técnica informados abrirán nuevas vías para las tareas de reconocimiento y clasificación en la conducción autónoma, operaciones de rescate, y teledetección en el futuro.
Estos científicos resumen el principio operativo de su marco de reconstrucción:
"Diseñamos el término de regularización colaborativa bajo tres supuestos:(1) El objetivo reconstruido es escaso en el dominio de reconstrucción; (2) Las estructuras locales del objeto oculto se repiten muchas veces en el dominio de reconstrucción; (3) La señal correspondiente a la reconstrucción el objetivo es suave ".
"El marco propuesto también se puede utilizar como módulo enchufable en diferentes modelos físicos. Además, el término de regularización colaborativa propuesto puede simplificarse aún más para adaptarse a los casos en los que solo es necesario reconstruir el albedo, ", agregaron.
"En el plazo de regularización colaborativo propuesto, Se utilizan dos diccionarios para capturar las estructuras locales y las correlaciones no locales de la escena fuera de la línea de visión directa. Los átomos del diccionario y sus coeficientes correspondientes pueden verse como características del objetivo reconstruido, que se puede utilizar para otras tareas, como el reconocimiento y la clasificación en diversas aplicaciones, "pronostican los científicos.