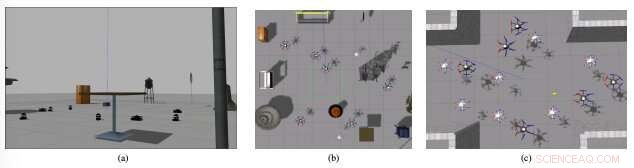
Instantáneas mientras los robots navegan por diferentes entornos desconocidos utilizando el algoritmo propuesto en este trabajo. Crédito:Govind Aadithya R et al.
Investigadores del Instituto de Ciencia y Tecnología SRM en India han desarrollado recientemente un algoritmo de generación de trayectoria descentralizada para sistemas de múltiples agentes. Su algoritmo, presentado en un artículo publicado previamente en arXiv, puede generar trayectorias libres de colisiones para los robots cuando se les proporciona un estado inicial y una pose final deseada.
"Govind y su equipo se acercaron ambiciosamente a mí en busca de mi sugerencia para su proyecto de licenciatura, "Sivanathan K, investigador principal que supervisó el estudio, dijo a TechXplore. "Conociendo su habilidad matemática, Sentí que se les debería asignar un problema desafiante que el futuro espera resolver. A medida que el mundo avanza hacia los vehículos autónomos, Sugerí desarrollar un algoritmo descentralizado para que los vehículos autónomos naveguen por las intersecciones. Sentimos que el rendimiento del algoritmo no estaba a la altura de los estándares, así que ampliamos el trabajo para desarrollar un algoritmo que pudiera permitir a los vehículos autónomos navegar a través de un entorno desconocido, evitando colisiones con otros robots / obstáculos ".
Los sistemas de múltiples robots involucran una serie de agentes robóticos o vehículos autónomos que colaboran en una variedad de tareas. Estos sistemas podrían tener aplicaciones interesantes en varias áreas, incluido el transporte, entretenimiento, seguridad y exploración espacial.
Cuando varios robots trabajan juntos en una tarea determinada, sus trayectorias requieren una planificación cuidadosa para asegurarse de que los robots no chocan entre sí y de que no se violen sus límites dinámicos. Hasta aquí, la mayoría de los enfoques para la generación de trayectorias se han centralizado, lo que significa que generan trayectorias de antemano y luego las transmiten a robots individuales.
Si bien los enfoques centralizados funcionan bien en entornos conocidos y con un número limitado de robots, son muy difíciles de aplicar a mayor escala. En años recientes, por lo tanto, Los investigadores han estado trabajando en enfoques descentralizados que pueden volver a planificar continuamente las trayectorias, responder a cambios u obstáculos inesperados en el medio ambiente.
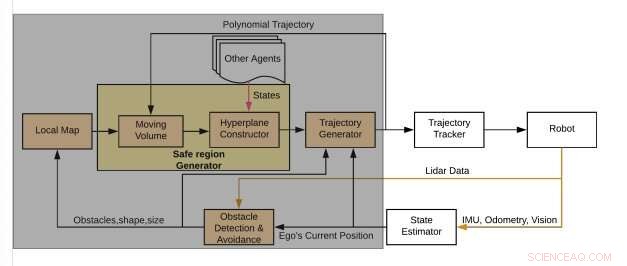
La descripción general del sistema de un agente individual. Las flechas naranjas representan datos sin procesar, el rojo representa datos de fuentes externas y el negro representa los datos procesados y el lado del flujo. El foco de este trabajo es la parte sombreada. Crédito:Govind Aadithya R et al.
El equipo de investigadores del SRM Institute desarrolló un nuevo algoritmo descentralizado para la generación de trayectorias de sistemas multiagente. Su enfoque sigue un proceso de dos pasos, generando regiones convexas libres de colisiones en las que un robot estará restringido, prediciendo las posiciones de otros robots.
"Nuestro enfoque tiene dos subobjetivos. El primero es la Identificación del medio ambiente, que incluye la generación de mapas para el yo y la predicción de la trayectoria para otros en el entorno para identificar la región segura del ego (desde el punto de vista del vehículo de interés), "Govind Aadithya R, uno de los investigadores que realizó el estudio, Le dijo a TechXplore. "Luego viene el objetivo de la navegación dentro de la región segura para llegar al destino deseado, para lo cual generamos la trayectoria del ego con la información disponible y la re-planificamos regularmente para dar cuenta de los cambios que ocurren alrededor del ego. Para asegurarse de que el ego se mueva por el camino especificado, los estados se rastrean mediante un rastreador de trayectoria ".
Govind y sus colegas emplearon un método simple para la detección de obstáculos, utilizando mapas locales basados en formas para formular regiones seguras para agentes individuales. Basado en estos datos, su algoritmo predice trayectorias para otros robots y las incorpora al modelo para evitar colisiones al redimensionar las regiones en las que un robot puede navegar sin colisionar.
"Para mi, Una de las conclusiones más significativas de este trabajo es que la verificación continua de colisiones en el tiempo es de primordial importancia para una navegación segura sin colisiones. "Shravan Krishnan, otro investigador involucrado en el estudio, dijo a TechXplore. "También, para evitar colisiones, Descubrimos que las técnicas de mapeo complejas no son de suma importancia, pero siguen siendo una necesidad cuando se trata de un uso óptimo del espacio. Esto implica que para maniobras conservadoras, las representaciones de obstáculos basadas en geometría simple son suficientes pero para maniobras dinámicas y agresivas que utilizan el espacio completo, las geometrías complejas son una necesidad ".
Los investigadores evaluaron su enfoque en simulaciones en la plataforma Gazebo, utilizar ROS con robots aéreos planos y robots con ruedas no holonómicos; tanto en entornos similares a intersecciones como no estructurados. Su algoritmo fue capaz de generar trayectorias suaves de manera efectiva en entornos restringidos, evitando colisiones entre robots.
"Llevando esto adelante, nos gustaría ampliar el algoritmo en 3-D, agregando una dimensión más, "Vijay Arvindh B, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Actualmente estamos trabajando en las fallas que deben corregirse para poder evaluar el algoritmo en 3-D".
© 2019 Science X Network