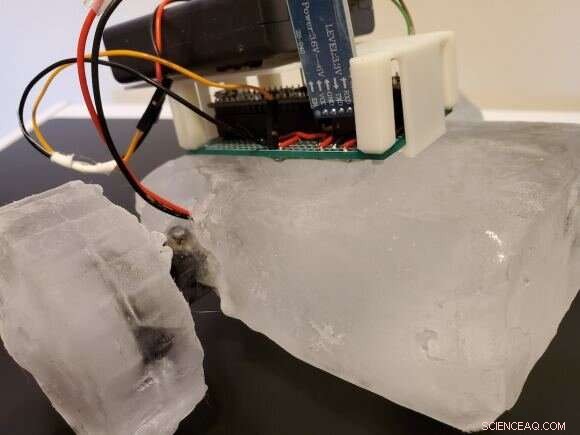
El IceBot es solo un concepto en este momento, con algunas partes estructurales hechas de hielo. Crédito:Laboratorio GRASP
Algunos de los objetivos más tentadores de la exploración espacial son los mundos de hielo congelado. Toma la luna de Júpiter, Europa, por ejemplo. Está templado, El océano subterráneo salado está enterrado bajo una capa de hielo que cubre el ancho de la luna. ¿Cuál es la mejor forma de explorarlo?
Quizás un robot de hielo podría desempeñar un papel.
Aunque las agencias espaciales del mundo, especialmente la NASA, están mejorando cada vez más en la construcción de robots para explorar lugares como Marte, esos robots tienen limitaciones. Quizás la principal de esas limitaciones sea la posibilidad de avería. Una vez que un rover en Marte, o en algún lugar aún más distante, se descompone, se acabó el juego. No hay forma factible de reparar algo como MSL Curiosity si se descompone mientras se explora la superficie marciana.
Pero, ¿y si el mundo que se está explorando fuera congelado? y el robot estaba hecho de hielo? ¿Podrían los robots helados realizar autorreparaciones? incluso de forma limitada? ¿Podrían realmente fabricarse y ensamblarse allí? incluso en parte?
Un artículo reciente titulado "Robots hechos de hielo:un análisis de las técnicas de fabricación" exploró esa posibilidad. El documento fue presentado en la Conferencia Internacional de Robótica y Sistemas del IEEE (Instituto de Ingenieros Eléctricos y Electrónicos) 2020. Devin Carroll y Mark Yim lo escribieron. Carroll es un Ph.D. estudiante de robótica en la Universidad de Pennsylvania, y Yim es el Director del Laboratorio Grasp y profesor de ingeniería mecánica en la misma institución.
Todo el robot no estaría hecho de hielo, obviamente. Pero parte de la estructura podría serlo. La idea se centra en un diseño modular que podría autorrepararse o incluso autorreplicarse y podría completarse in situ después del despliegue. una vez que se comprendieron mejor los obstáculos del terreno y los detalles de las tareas de la misión.
En su resumen, los dos autores escriben, "El hielo permite una mayor flexibilidad en el diseño del sistema, permitiendo que la estructura robótica sea diseñada y construida después del despliegue después de que las tareas y los obstáculos del terreno se hayan identificado y analizado mejor ".
Obviamente, Hay muchos problemas y obstáculos con esta tecnología potencial. Pero así es como empiezan todos.
La pareja de autores deja claro que se trata de un trabajo preliminar. "Los autores exploran un enfoque basado en la estructura para examinar los procesos de fabricación compatibles con un énfasis en la conservación de las energías del proceso, "Ellos escriben. Una plataforma robótica móvil hecha de hielo se presenta como prueba de concepto y primera demostración".
La idea se centra en un rover de dos ruedas llamado Icebot. Icebot se basa en el diseño de los rovers antárticos y tiene elementos estructurales hechos de hielo.
En su trabajo, la pareja de autores realizó experimentos para explorar la idea completa. El trabajo se basó en dos supuestos:
Su artículo también presenta tres principios generales de diseño.
Hay otra condición general en todo esto, también. Para robots que operan en otros mundos, la energía es un bien preciado. Cada misión tiene un presupuesto de energía que se gestiona meticulosamente. Toma la nave espacial Voyager, por ejemplo. Su impresionante longevidad se debe, al menos en parte, al uso extremadamente escrupuloso de la energía. Por lo tanto, la cantidad de energía que utiliza un robot de hielo para fabricarse y construirse a sí mismo es fundamental.
Con esas condiciones en mente, a los investigadores se les ocurrieron algunas ideas interesantes.
En primer lugar, todo el escenario probablemente involucraría no a un solo robot sino a un par, operando en tándem. Una unidad sería el vehículo de exploración principal, y el otro sería como una nave nodriza y tendría las capacidades de fabricación y reparación.
En una entrevista con el Espectro IEEE , Devin Carroll explicó cómo podría verse esto. "Cuando pienso en un robot de exploración ártico (o planetario) que incorpora capacidades de auto-modificación o reparación, visualizo un sistema con dos tipos de robots:el primero explora el entorno y recopila los materiales necesarios para realizar el auto-aumento o la reparación, y el segundo es una especie de manipulador / sistema de fabricación. Podemos imaginar que la clase de exploración del robot regresará a una ubicación centralizada con una solicitud de un arado o algún otro aumento y el sistema de fabricación podrá conectar el aumento directamente al robot ".
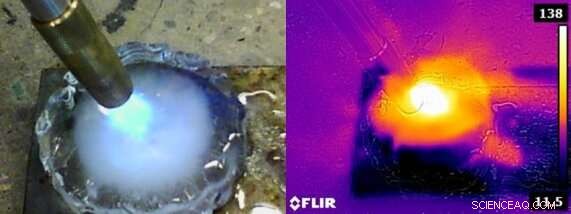
Los investigadores probaron una llama abierta como método para derretir agujeros en el hielo para colocar el actuador del robot. Izquierda:Se usa un soplete de butano para derretir un agujero en el blanco de hielo. Derecha:un mapa de calor (en grados C) del soplete de butano y el blanco de hielo. Crédito:Carroll y Yim, 2020
La pareja de científicos realizó algunas pruebas para desarrollar sus ideas. Observaron diferentes formas de manipular el hielo. Para fabricación, miraron molduras, donde el hielo primero se derrite y luego se vierte en un molde para darle forma. También analizaron la impresión 3D, y mecanizado. Cada método tiene sus pros y sus contras, y cada uno tiene diferentes requerimientos energéticos.
También analizaron la integración del actuador. Como se explica, los actuadores en sí mismos no pueden estar hechos de hielo. Los actuadores están expuestos a diferentes tensiones, el hielo no puede soportarlo. Por tanto, la integración de los actuadores con componentes hechos de hielo es una operación crítica.
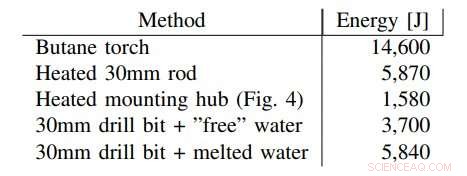
Experimentaron con cuatro formas diferentes de integrar actuadores:
Cada uno de los métodos tiene sus fortalezas y debilidades. Cada uno también tiene sus propias necesidades energéticas. La siguiente tabla presenta la energía requerida para cada método para crear un bolsillo de montaje para el actuador, y congelarlo en su lugar.
Dado que este es un trabajo preliminar, el equipo no llegó a conclusiones definitivas. Pero sus experimentos expusieron algunos escollos que deberán superarse si alguna vez se va a implementar de manera efectiva la fabricación y reparación de hielo in situ.
Descubrieron que el área de la superficie del accesorio es fundamental para el éxito, lo cual no es una sorpresa. En una palabra, una mayor superficie en la articulación es mejor, y ayuda al hielo a resistir las tensiones debidas al par de torsión y otras fuerzas. El espesor del hielo también fue un problema, lo cual tampoco es sorprendente.
Los autores resumen su trabajo en la conclusión del artículo. "Este trabajo es un paso hacia un peso ligero, Sistema robótico adaptable capaz de funcionar en entornos bajo cero. Este sistema se presta a la autoconfiguración, autorreplicación y autorreparación, " escriben.
"Para impulsar el desarrollo de métodos automatizados para la creación y ensamblaje de este sistema, planeamos buscar un módulo conjunto que pueda integrarse fácilmente con bloques pasivos de hielo, "escriben. Eso haría que el sistema IceBot sea más simple y modular.
También explicaron lo que depara el futuro para su concepto IceBot:"El trabajo futuro adicional incluye:determinar una clase general de superficie sobre la cual este sistema puede moverse, métodos de uso de elementos de hielo para interactuar con el medio ambiente, y una mayor investigación sobre los límites de resistencia de las conexiones entre los actuadores y el hielo ".
En el Espectro IEEE entrevista, Carroll también habló sobre lo que sigue para sus esfuerzos IceBot y enfatizó la necesidad de modularidad. "Mi enfoque inmediato es diseñar una junta modular que podamos usar para unir actuadores con bloques de hielo de manera fácil y segura, así como trabajar para desarrollar un efector final que nos permita manipular bloques de hielo sin deformarlos permanentemente mediante orificios para tornillos u otros , métodos de conexión similares ".
Hay mucho trabajo por hacer antes de que se pueda implementar cualquier tecnología de robótica de hielo. Pero es un desarrollo tentador, y Europa y Encelado están esperando. Agencias como la NASA están analizando de cerca los recursos in situ para sus misiones a la Luna y Marte.
El hielo es común en el sistema solar. El espacio es gélido y muchos cuerpos están cubiertos de hielo. ¿Podría haber un IceBot in situ en el futuro?