El programa de análisis basado en aprendizaje automático para sistemas autónomos móviles (MAARS) abarca una variedad de áreas en las que la inteligencia artificial podría ser útil. El equipo presentó los resultados del proyecto MAARS en la Conferencia Aeroespacial IEEE en marzo de 2020. El proyecto fue finalista del Premio al Software de la NASA. Crédito:NASA JPL
Los vehículos exploradores de Marte de la NASA han sido uno de los grandes éxitos científicos y espaciales de las últimas dos décadas.
Cuatro generaciones de rovers han atravesado el planeta rojo recopilando datos científicos, enviando fotografías evocadoras, y sobrevivir a condiciones increíblemente duras, todo ello con ordenadores de a bordo menos potentes que un iPhone 1. El último móvil, Perseverancia, fue lanzado el 30 de julio, 2020, y los ingenieros ya están soñando con una futura generación de rovers.
Si bien es un gran logro, estas misiones solo han arañado la superficie (literal y figurativamente) del planeta y su geología, geografía, y ambiente.
"El área de la superficie de Marte es aproximadamente la misma que el área total de la tierra en la Tierra, "dijo Masahiro (Hiro) Ono, líder del grupo Robotic Surface Mobility Group en el Jet Propulsion Laboratory (JPL) de la NASA, que ha dirigido todas las misiones del rover a Marte, y uno de los investigadores que desarrolló el software que permite el funcionamiento del rover actual.
"Imagina, eres un extraterrestre y no sabes casi nada de la Tierra, y aterrizas en siete u ocho puntos de la Tierra y conduces unos cientos de kilómetros. ¿Esa especie alienígena sabe lo suficiente sobre la Tierra? ", Preguntó Ono." No. Si queremos representar la enorme diversidad de Marte, necesitaremos más mediciones en el suelo, y la clave es una distancia sustancialmente extendida, con suerte cubriendo miles de millas ".
Viajando a través de la diversidad de Marte, terreno traicionero con potencia informática limitada y una dieta energética restringida:solo la cantidad de sol que el rover puede capturar y convertir en energía en un solo día marciano, o sol — es un gran desafío.
El primer rover, Sojourner, cubrió 330 pies sobre 91 soles; el segundo, Espíritu, viajó 4.8 millas en aproximadamente cinco años; Oportunidad, viajó 28 millas durante 15 años; y Curiosity ha viajado más de 12 millas desde que aterrizó en 2012.
"Nuestro equipo está trabajando en la autonomía de los robots de Marte para hacer que los futuros rovers sean más inteligentes, para mejorar la seguridad, para mejorar la productividad, y en particular para conducir más rápido y más lejos, "Dijo Ono.
Nuevo hardware, Nuevas posibilidades
El rover Perseverance, que se lanzó este verano, computa usando RAD 750s, computadoras de placa única reforzadas contra la radiación fabricadas por BAE Systems Electronics.
Misiones futuras, sin embargo, potencialmente usaría nuevos de alto rendimiento, procesadores reforzados con radiación de varios núcleos diseñados a través del proyecto de Computación de vuelo espacial de alto rendimiento (HPSC). (El procesador Snapdragon de Qualcomm también se está probando para misiones). Estos chips proporcionarán aproximadamente cien veces la capacidad computacional de los procesadores de vuelo actuales que utilizan la misma cantidad de energía.
"Toda la autonomía que ves en nuestro último rover de Marte es en gran parte humana en el circuito", lo que significa que requiere la interacción humana para funcionar. según Chris Mattmann, el subdirector de tecnología e innovación de JPL. "Parte del motivo son los límites de los procesadores que se ejecutan en ellos. Una de las misiones principales de estos nuevos chips es realizar aprendizaje profundo y aprendizaje automático, como lo hacemos terrestre, a bordo. ¿Cuáles son las aplicaciones asesinas dado ese nuevo entorno informático? "
El programa de análisis basado en aprendizaje automático para sistemas autónomos móviles (MAARS), que comenzó hace tres años y concluirá este año, abarca una variedad de áreas en las que la inteligencia artificial podría ser útil. El equipo presentó los resultados del proyecto MAARS en la Conferencia Aeroespacial de hIEEE en marzo de 2020. El proyecto fue finalista del Premio al Software de la NASA.
"La informática terrestre de alto rendimiento ha permitido avances increíbles en la navegación de vehículos autónomos, aprendizaje automático, y análisis de datos para aplicaciones terrestres, ", escribió el equipo en su documento IEEE." El principal obstáculo para el despliegue de tales avances en la exploración de Marte es que las mejores computadoras están en la Tierra, mientras que los datos más valiosos se encuentran en Marte ".
Entrenamiento de modelos de aprendizaje automático en la supercomputadora Maverick2 en el Centro de Computación Avanzada de Texas (TACC), así como en los clústeres de Amazon Web Services y JPL, Ono, Mattmann y su equipo han estado desarrollando dos capacidades novedosas para los futuros rovers de Marte, lo que ellos denominan Ciencia Drive-By y Navegación Autónoma de Energía Óptima.
Navegación autónoma de energía óptima
Ono fue parte del equipo que escribió el software de búsqueda de caminos integrado para Perseverance. El software de Perseverance incluye algunas habilidades de aprendizaje automático, pero la forma en que lo hace es todavía bastante ingenua.
"Nos gustaría que los futuros rovers tuvieran una capacidad similar a la humana para ver y comprender el terreno, "Ono dijo." Para los rovers, energy is very important. There's no paved highway on Mars. The drivability varies substantially based on the terrain—for instance beach versus. bedrock. That is not currently considered. Coming up with a path with all of these constraints is complicated, but that's the level of computation that we can handle with the HPSC or Snapdragon chips. But to do so we're going to need to change the paradigm a little bit."
Ono explains that new paradigm as commanding by policy, a middle ground between the human-dictated:"Go from A to B and do C, " and the purely autonomous:"Go do science."
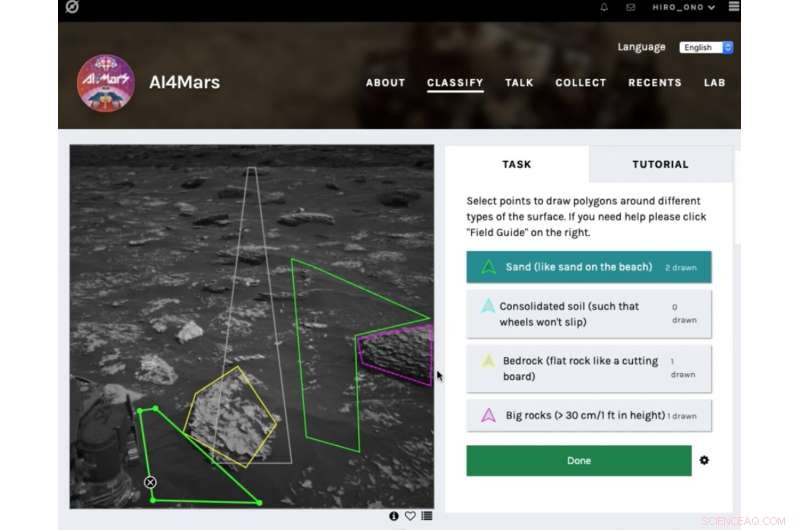
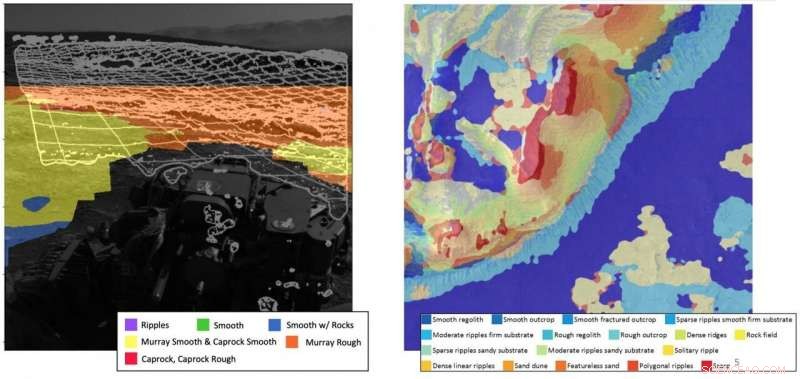
The public tool AI4Mars shows different kinds of Martian terrain as seen by NASA's Curiosity rover. By drawing borders around terrain features and assigning one of four labels to them, users can help train an algorithm that will automatically identify favorable and hazardous terrain for Curiosity's rover planners. Crédito:NASA / JPL-Caltech
Commanding by policy involves pre-planning for a range of scenarios, and then allowing the rover to determine what conditions it is encountering and what it should do.
"We use a supercomputer on the ground, where we have infinite computational resources like those at TACC, to develop a plan where a policy is:if X, then do this; if y, then do that, " Ono explained. "We'll basically make a huge to-do list and send gigabytes of data to the rover, compressing it in huge tables. Then we'll use the increased power of the rover to de-compress the policy and execute it."
The pre-planned list is generated using machine learning-derived optimizations. The on-board chip can then use those plans to perform inference:taking the inputs from its environment and plugging them into the pre-trained model. The inference tasks are computationally much easier and can be computed on a chip like those that may accompany future rovers to Mars.
"The rover has the flexibility of changing the plan on board instead of just sticking to a sequence of pre-planned options, " Ono said. "This is important in case something bad happens or it finds something interesting."
Drive-By Science
Current Mars missions typically use tens of images a Sol from the rover to decide what to do the next day, according to Mattmann. "But what if in the future we could use one million image captions instead? That's the core tenet of Drive-By Science, " he said. "If the rover can return text labels and captions that were scientifically validated, our mission team would have a lot more to go on."
Mattmann and the team adapted Google's Show and Tell software—a neural image caption generator first launched in 2014—for the rover missions, the first non-Google application of the technology.
The algorithm takes in images and spits out human-readable captions. These include basic, but critical information, like cardinality—how many rocks, how far away?—and properties like the vein structure in outcrops near bedrock. "The types of science knowledge that we currently use images for to decide what's interesting, " Mattmann said.
En los ultimos años, planetary geologists have labeled and curated Mars-specific image annotations to train the model.
"We use the one million captions to find 100 more important things, " Mattmann said. "Using search and information retrieval capabilities, we can prioritize targets. Humans are still in the loop, but they're getting much more information and are able to search it a lot faster."
Results of the team's work appear in the September 2020 issue of Ciencia planetaria y espacial .
TACC's supercomputers proved instrumental in helping the JPL team test the system. On Maverick 2, the team trained, validated, and improved their model using 6, 700 labels created by experts.
The ability to travel much farther would be a necessity for future Mars rovers. An example is the Sample Fetch Rover, proposed to be developed by the European Space Association and launched in late 2020s, whose main task will be to pick up samples dug up by the Mars 2020 rover and collect them.
"Those rovers in a period of years would have to drive 10 times further than previous rovers to collect all the samples and to get them to a rendezvous site, " Mattmann said. "We'll need to be smarter about the way we drive and use energy."
Before the new models and algorithms are loaded onto a rover destined for space, they are tested on a dirt training ground next to JPL that serves as an Earth-based analog for the surface of Mars.
The team developed a demonstration that shows an overhead map, streaming images collected by the rover, and the algorithms running live on the rover, and then exposes the rover doing terrain classification and captioning on board. They had hoped to finish testing the new system this spring, but COVID-19 shuttered the lab and delayed testing.
Mientras tanto, Ono and his team developed a citizen science app, AI4Mars, that allows the public to annotate more than 20, 000 images taken by the Curiosity rover. These will be used to further train machine learning algorithms to identify and avoid hazardous terrains.
The public have generated 170, 000 labels so far in less than three months. "People are excited. It's an opportunity for people to help, " Ono said. "The labels that people create will help us make the rover safer."
The efforts to develop a new AI-based paradigm for future autonomous missions can be applied not just to rovers but to any autonomous space mission, from orbiters to fly-bys to interstellar probes, Ono says.
"The combination of more powerful on-board computing power, pre-planned commands computed on high performance computers like those at TACC, and new algorithms has the potential to allow future rovers to travel much further and do more science."