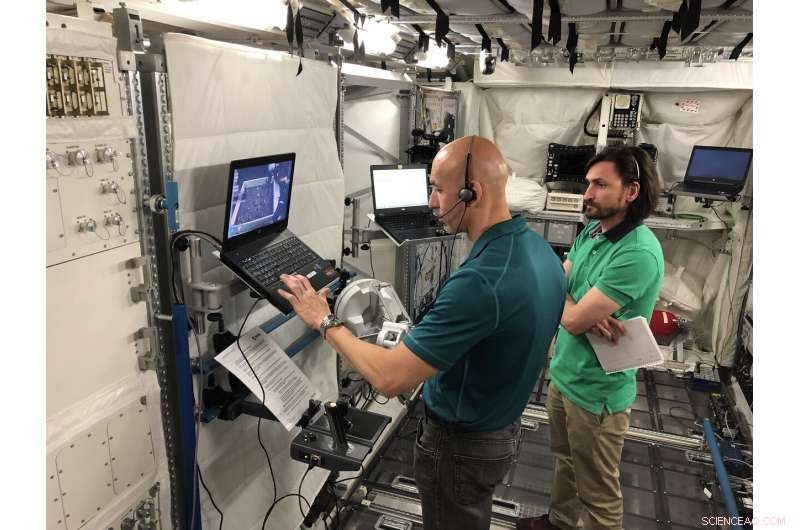
El astronauta de la ESA Luca Parmitano se prepara para las operaciones del experimento ANALOG-1 en tierra en el Centro Europeo de Astronautas de Colonia. Alemania. La investigación requerirá que controle de forma remota un rover terrestre desde la estación espacial. Crédito:ESA
Los astronautas podrían algún día controlar de forma remota los rovers de la Luna y Marte desde la órbita. Una próxima prueba a bordo de la Estación Espacial Internacional podría ayudar a que esto sea una posibilidad. En noviembre, la ESA (Agencia Espacial Europea) llevará a cabo un experimento en órbita conocido como ANALOG-1 para ver si los equipos de la estación, Los científicos en tierra y la nueva tecnología pueden trabajar juntos para guiar a un rover en una misión lunar simulada.
Este proyecto investiga la eficacia con la que un astronauta de la Estación Espacial Internacional puede operar un rover en un terreno similar a la Luna en la Tierra. El rover tiene la tarea de recolectar muestras de roca y suelo, luego investigando remotamente las muestras.
"Este es un escenario científico potencial durante futuras misiones a la Luna y Marte, "dijo William Carey, Científico de la ESA e investigador principal del experimento ANALOG-1. "El espacio es un lugar tan duro para los humanos y las máquinas. La exploración futura del sistema solar puede implicar el envío de exploradores robóticos para probar las aguas en planetas inexplorados antes de enviar humanos".
Cerrar remotamente
ANALOG-1 es el paso final del proyecto METERON (Red de operaciones robóticas de extremo a extremo multipropósito) en curso de la ESA, que es una iniciativa para desarrollar y probar la robótica, innovaciones en comunicaciones y operaciones que los astronautas podrían utilizar para explorar el sistema solar.
Históricamente, Los vehículos exploradores que exploran otros planetas han sido controlados con software preprogramado y por científicos que envían comandos desde la Tierra que tardan mucho tiempo en llegar a los robots. Estos enfoques funcionaron lo suficientemente bien como para avanzar en gran medida nuestro conocimiento de otros mundos, pero pueden dificultar el trabajo rápido cambiar planes o adaptarse rápidamente a situaciones inesperadas.
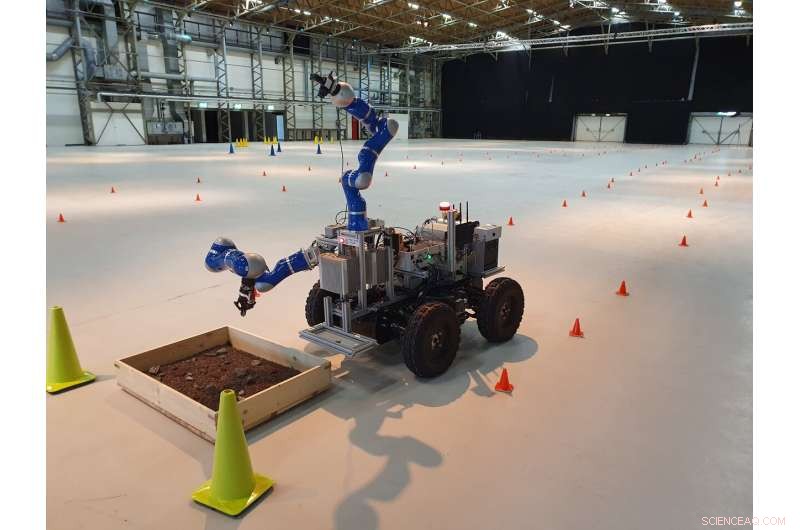
El rover ANALOG-1 Interact ubicado cerca del Centro Europeo de Investigación y Tecnología Espacial en los Países Bajos está controlado por un astronauta sustituto con base en el Centro Europeo de Astronautas en Alemania. Los conos marcan una ruta que el rover debe seguir para llegar al sitio de la muestra. Crédito:ESA
Carey y su equipo de la ESA sospechan que un método mejor podría ser colocar a los astronautas en órbita alrededor de los sitios de exploración donde podrían comunicarse rápidamente con el rover. Con un astronauta cercano a los controles del rover, los científicos podrían explorar de manera más eficiente un objetivo planificado, aproveche una oportunidad sorpresa o gestione rápidamente un problema.
"Varias agencias espaciales han analizado este escenario para la exploración de cuerpos planetarios, particularmente para Marte, ", dijo Carey." El enfoque podría aumentar en gran medida el rendimiento científico de esas misiones, además de ofrecer una forma de evitar la contaminación potencial de los humanos que aterrizan en la superficie antes de que podamos responder preguntas sobre la vida existente o anterior en Marte ".
Los resultados del experimento podrían ser de particular valor para la NASA mientras se prepara para explorar la Luna desde la nave espacial Gateway planeada como parte del programa Artemis. donde la NASA avanzará hacia la Luna y hacia Marte.
Al alcance de la mano
Durante el experimento de dos horas, El astronauta de la ESA Luca Parmitano utilizará una estación de trabajo a bordo del laboratorio en órbita para intentar comandar un rover controlable de forma remota y su brazo mientras atraviesa una superficie similar a la Luna cerca de Noordwijk. una ciudad en los Países Bajos. Parmitano conducirá el robot utilizando un sistema informático especializado y será guiado por científicos que se comunicarán con él en tierra. También utilizará un "joystick" Sigma 7 de última generación que permitirá al astronauta sentir lo que encuentra el brazo del rover.
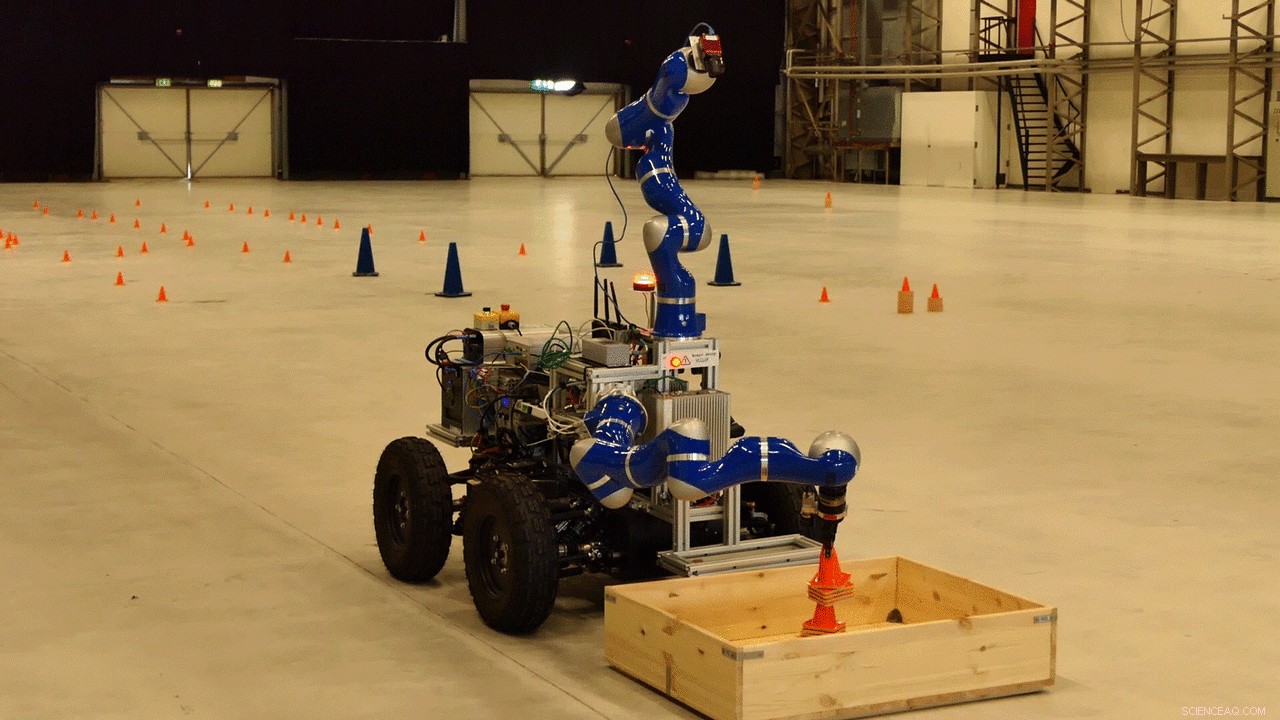
El rover que se utilizará como parte del experimento ESA ANALOG-1 mueve conos dentro de la caja de muestra que contendrá rocas durante el experimento. Créditos:ESA
"La retroalimentación de fuerza permite al operador sentir lo que siente el robot, ", dijo el ingeniero jefe de robótica de la ESA, Thomas Krueger." Por ejemplo, si el robot toca un objeto frágil, mide y transmite información al usuario, que luego siente su delicadeza en el joystick Sigma 7. Entonces pueden operar el brazo con más cuidado que con un joystick normal ".
Parmitano usará el joystick para dirigir el brazo del robot para que tome muestras de roca y tierra de regreso a la Tierra. Los científicos esperan que pueda enfrentar dificultades adicionales debido a la forma en que el cuerpo humano responde al espacio. La investigación ha demostrado que la microgravedad puede afectar el sentido del tacto o el tacto de un astronauta, así como la capacidad de rastrear objetos en movimiento, los cuales son críticos en la tarea de esta investigación.
Evaluación de la tarea en cuestión
Cuando termine el experimento, Los investigadores en el terreno evaluarán qué tan bien funcionaron los sistemas de control robótico y examinarán la capacidad de Parmitano para operar el rover bajo los efectos de la microgravedad. También observarán qué tan bien Parmitano y el equipo científico en la Tierra pudieron comunicarse para tomar decisiones y planes para controlar el rover.
"Los robots tienen la capacidad de extender nuestra presencia en otros mundos y aumentar nuestra eficiencia de exploración, ", dijo el director de proyectos de la ESA, Kjetil Wormnes." Los resultados de ANALOG-1 nos ayudarán a determinar la forma más eficaz de colaborar con los robots a fin de prepararnos para nuestra futura exploración de la Luna ".