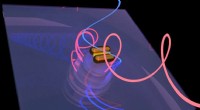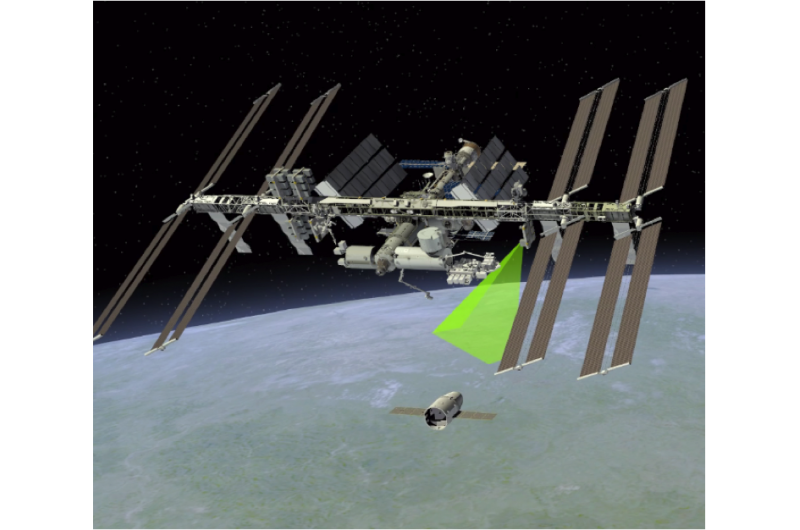
Representación de un artista de Raven rastreando un vehículo que se acerca a la Estación Espacial Internacional. Crédito:Centro de vuelos espaciales Goddard de la NASA
Lanzando pronto, a bordo de la décima misión de reabastecimiento comercial de SpaceX, será un módulo de tecnología llamado Raven, lo que acercará a la NASA un paso más a tener una capacidad de navegación relativa. Cuando se coloca fuera de la Estación Espacial Internacional, Raven probará tecnologías fundamentales que permitirán el encuentro autónomo en el espacio, lo que significa que no necesitarán ninguna participación humana, incluso desde el suelo.
Para visualizar por qué el encuentro autónomo es importante en las misiones espaciales, imagina este escenario:una nave espacial siguiendo a otro satélite, cerrando la brecha constantemente, con cada vehículo viajando más de 16, 000 millas por hora en la oscuridad del espacio. El satélite al que se le está dando servicio, el cliente, es una nave de varias toneladas que se está quedando sin combustible. El satélite de servicio totalmente robótico, el administrador, llamado Restore-L sigue en su persecución, llevar propelente y herramientas que prolongan la vida útil.
El cliente, no diseñado para ser reparado, no tiene marcas para que sea más fácil para el administrador encontrarlo y asegurarlo. El administrador tiene que hacer esto por su cuenta, utilizando un sistema avanzado de visión artificial, perfeccionado utilizando los datos recopilados por Raven a bordo de la estación espacial. El mantenimiento exitoso primero depende de la capacidad del administrador para ubicar con precisión y hacer coincidir la velocidad con el satélite del cliente.
Para complicar aún más este escenario, el administrador está lejos de la Tierra, creando un retraso en las comunicaciones para el intercambio de comandos y datos desde y hacia el espacio. La demora impide que los operadores terrestres proporcionen comandos al encargado de mantenimiento de manera rápida y precisa para evitar una posible colisión en los últimos pies del punto de encuentro.
Por lo tanto, el administrador tiene que realizar una navegación relativa con su cliente, y necesita hacerlo de forma autónoma (por sí mismo, sin guía humana), y en tiempo real.
"El encuentro autónomo de dos naves espaciales es crucial para muchas misiones futuras de la NASA y Raven está madurando esta tecnología nunca antes intentada, "dijo Ben Reed, subdirector de división, para la División de Proyectos de Servicio de Satélites (SSPD) en el Centro de Vuelo Espacial Goddard de la NASA en Greenbelt, Maryland:la oficina que desarrolla y administra esta misión de demostración.
Raven demostrará la capacidad de un sistema de navegación relativo innovador, alojado dentro de su marco del tamaño de un equipaje de mano, que permitirá a un servidor de naves espaciales encontrar, y si es necesario, atrapar su objetivo previsto. Raven tiene como objetivo conducir a un desarrollo completo, sistema maduro disponible para futuras misiones de la NASA.

Módulo de tecnología Raven, pre lanzamiento. Crédito:Centro de vuelos espaciales Goddard de la NASA / Chris Gunn
Cinco días después del lanzamiento, Raven será retirado del "baúl" sin presión de la nave espacial SpaceX Dragon por el brazo robótico Dextre, y unido a una plataforma de carga útil fuera de la estación espacial. Desde esta percha, Raven comenzará a proporcionar información para el desarrollo de un sistema de navegación relativo en tiempo real maduro.
Durante su estancia a bordo de la estación espacial, Los componentes de Raven unirán fuerzas para obtener imágenes y rastrear de forma independiente las naves espaciales de la estación espacial visitantes entrantes y salientes. Para hacer esto, Los sensores de Raven enviarán los datos que "ven" a un procesador, que ejecutará conjuntos de instrucciones (también conocidas como algoritmos de pose especial) para medir la distancia relativa entre Raven y la nave espacial que está rastreando. Luego, basado en estos cálculos, el procesador enviará de forma autónoma comandos que giran el módulo Raven en su cardán, o sistema de apuntamiento, para mantener los sensores entrenados en el vehículo, sin dejar de rastrearlo. Mientras se llevan a cabo estas maniobras, Los operadores de la NASA en tierra evaluarán cómo las tecnologías de Raven funcionan juntas como un sistema, y hará ajustes para aumentar el rendimiento de seguimiento de Raven.
Durante su vida útil de dos años, Raven will test these critical technologies that are expected to support future NASA missions for decades to come. One upcoming application for this technology is its use in the Restore-L servicing mission which will navigate to refuel Landsat 7, a U.S. government Earth-observing satellite already in orbit. An additional application is the potential use for systems on NASA's Journey to Mars. Raven is on track to advance and mature the sensors, machine vision algorithms, and processing necessary to implement a robust autonomous rendezvous and docking system for NASA. SSPD is developing and managing both the Raven and Restore-L demonstration missions.