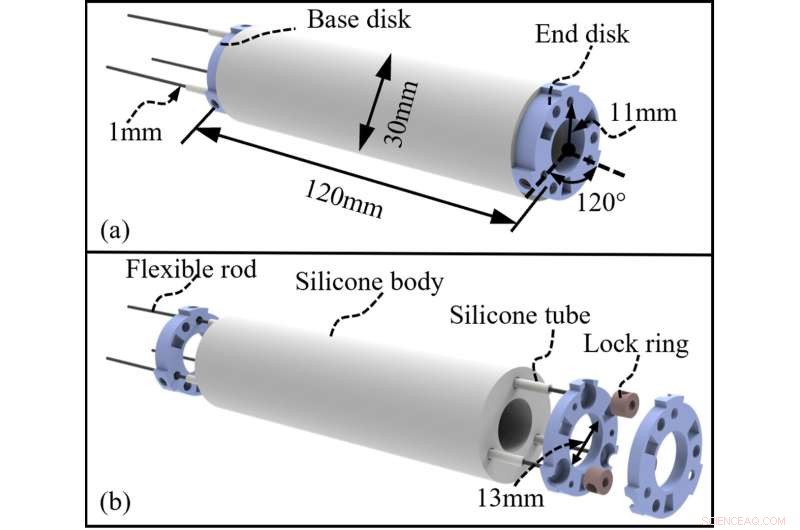
Estructura del brazo blando accionado por varilla. (a) Visión general del diseño. (b) Vista explosionada. Crédito:Wang et al.
Los robots blandos que pueden completar tareas con alta eficiencia, exactitud y precisión podrían tener numerosas aplicaciones valiosas. Por ejemplo, podrían introducirse en entornos médicos, ayudando a los médicos a realizar procedimientos quirúrgicos complejos o ayudando a pacientes ancianos y vulnerables durante la rehabilitación.
Los robots blandos son más flexibles y pueden deformarse más. Esto puede resultar en una mayor destreza (es decir, mejores habilidades manuales al completar tareas), así como en una reducción de la carga útil (es decir, la capacidad del robot para transportar una carga), porque pueden producir fuerzas más pequeñas que los sistemas robóticos rígidos
Investigadores de la Universidad Nacional de Singapur y la Universidad Jiaotong de Beijing han desarrollado recientemente un nuevo robot blando accionado por varillas (RDSR) que funciona mediante movimientos de empujar y tirar. Este robot, presentado en un artículo publicado en IEEE Robotics and Automation Letters , combina los mecanismos de dos sistemas robóticos creados previamente por miembros del grupo de investigación.
"Un rendimiento bien equilibrado en términos de destreza, precisión y carga útil podría tener un gran potencial en aplicaciones de robots blandos", dijo a TechXplore Cecilia Laschi, una de las investigadoras que llevó a cabo el estudio. "Muchos estudios se están centrando en esta área y algunos trabajos y logros anteriores nos inspiraron. Por ejemplo, en una investigación pionera publicada en Materials Science and Engineering, desarrollamos un robot blando inspirado en el pulpo, impulsado por tendones longitudinales y transversales, de manera similar. a los músculos del pulpo".
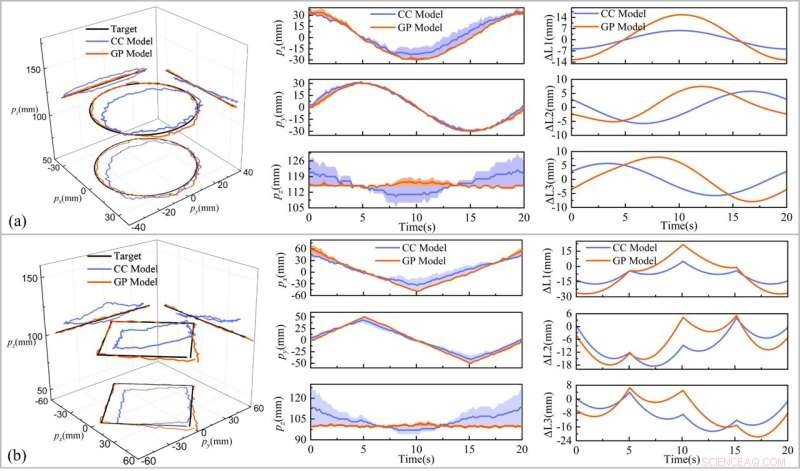
Desempeño de seguimiento de trayectoria del control de bucle abierto basado en el modelo CC y GP. (a) Caso de trayectoria circular. (b) Caso de camino cuadrado. Crédito:Wang et al.
El robot anterior creado por Laschi y sus colegas en el Instituto de BioRobótica de la Scuola Superiore Sant'Anna en Italia puede emular la forma en que se mueve un pulpo alargando, acortando y doblando sus tentáculos. Su sistema recientemente desarrollado podría ser particularmente prometedor para completar misiones en espacios confinados, como limpieza o exploraciones, acceder a cavidades profundas e intervenir dentro del cuerpo humano.
"El segundo estudio que inspiró nuestro trabajo reciente fue el desarrollo de mi equipo de investigación de un robot continuo basado en varillas flexibles de empuje y tracción", explicó Peiyi Wang, otro investigador involucrado en el estudio. "Al combinar el cuerpo blando puro de nuestro sistema inspirado en un pulpo y el brazo accionado por varilla del robot de Wang, nuestro nuevo robot tiene como objetivo lograr un rendimiento equilibrado en precisión de movimiento, espacio de trabajo, DOF, rigidez y fuerza de salida activa".
El nuevo robot creado por Laschi, Wang y sus colegas consta de un cuerpo blando de silicona, una base rígida, discos finales y tres tubos de silicona que albergan una varilla flexible basada en Nitinol (NiTi) cada uno. El cuerpo de silicona, que está integrado entre la base y el disco final, es muy suave y flexible, por lo que se puede alargar, acortar y doblar fácilmente.
"Cada una de las varillas flexibles de nuestro sistema se puede controlar tanto en la dirección de empuje como de tracción, lo que es diferente de los tendones que solo tienen acción de tracción", dijo Wang. "El robot blando accionado por varillas (RDSR) puede realizar múltiples movimientos en cualquier dirección (múltiples grados de libertad), a través del control coordinado de tres varillas de empuje y tracción".
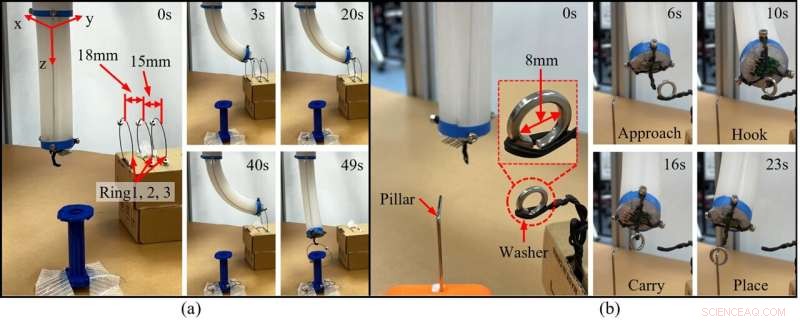
Manipulaciones de objetos realizadas por nuestro robot blando. RDSR completó tareas de recoger y colocar con una operación precisa de gran espacio de trabajo. (a) Los objetos se colocaron cerca del límite del espacio de trabajo (tarea 1). (b) Se colocó un objeto con un diámetro pequeño de 8 mm (tarea 2). Crédito:Wang et al.
Los investigadores evaluaron su RDSR en una serie de pruebas, comparando su rendimiento con el de un robot blando impulsado por tendones (TDSR) basado en silicona. Descubrieron que su nuevo sistema robótico era más rígido y podía operar dentro de un espacio de trabajo más amplio (de 2,6 a 5,2 veces más grande).
En contraste con el TDSR, también lo compararon, su robot podría aplicar activamente fuerzas perpendiculares de empuje en un plano inclinado y también podría completar tareas que involucran la manipulación de objetos. Combinados, todos estos hallazgos sugieren que el nuevo robot podría ser más efectivo para completar tareas que implican recoger y colocar objetos en espacios más grandes y con altos niveles de precisión.
"El movimiento obtenido con la actuación bidireccional de empujar y tirar es original", dijo Laschi. "Le da al robot blando un control más preciso. Una implicación notable de nuestro trabajo es su potencial para permitir un rendimiento equilibrado en términos de destreza, precisión y carga útil".
En el futuro, el nuevo sistema RDSR creado por este equipo de investigadores podría ayudar a abordar tareas complejas de manera más eficiente y confiable, logrando mayores niveles de precisión. En sus próximos estudios, a Laschi y sus colegas les gustaría probar la efectividad de los robots para aplicaciones biomédicas, incluida la cirugía, la rehabilitación y el cuidado de personas mayores.
“También planeamos mejorar el brazo blando que creamos en otros aspectos que no están estrictamente relacionados con su diseño y mecánica, sino con el control de sus movimientos”, agregó Laschi. "Agregar y modelar la propiocepción distribuida, es decir, la percepción de la propia postura del brazo, es un desafío para abordar, así como un sistema de detección robusto para detectar fuerzas de contacto".
© 2022 Red Ciencia X Configuración y manipulación de robótica blanda para servicio en órbita