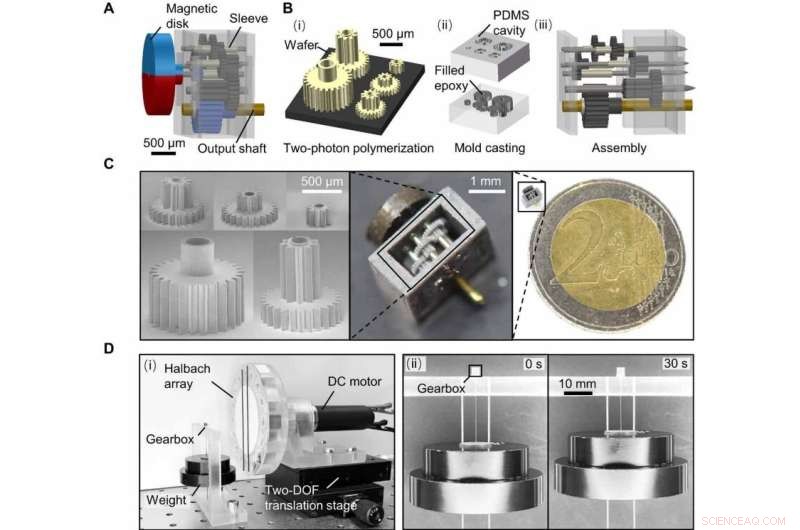
Diseño y funcionamiento de la caja de engranajes miniatura accionada magnéticamente para actuadores magnéticos de escala milimétrica. Crédito:Ciencia Robótica (2022). DOI:10.1126/scirobotics.abo4401
Un equipo de investigadores del Instituto Max Planck para Sistemas Inteligentes, en colaboración con un par de colegas del Instituto de Tecnología de Harbin, ha desarrollado una pequeña caja de cambios accionada que se puede usar para dar más potencia a robots muy pequeños. En su artículo publicado en la revista Science Robotics, el grupo describe cómo funciona su caja de cambios y las mejoras de potencia observadas en varios tipos de pequeños robots.
Durante los últimos años, los científicos han estado trabajando para desarrollar pequeños robots que puedan inyectarse en el cuerpo humano para llevar a cabo procedimientos médicos. La esperanza es que tales robots puedan enviarse para encontrar y destruir tumores cancerosos, por ejemplo. Tales diminutos robots son demasiado pequeños para llevar su propia planta de energía; por lo tanto, deben manipularse utilizando un campo magnético externo. Desafortunadamente, a medida que los robots se vuelven cada vez más pequeños, su poder disminuye porque tienen muy poca masa. En este nuevo esfuerzo, los investigadores han encontrado una forma de aumentar la potencia de los diminutos robots utilizando una pequeña caja de cambios que los ayuda a volverse más fuertes.
La caja de cambios viene con un imán en su extremo para aprovechar la potencia en un campo magnético a través de los engranajes de la caja. Y la caja de engranajes puede aumentar la potencia de un robot mediante funciones inteligentes que incluyen componentes elásticos y conexiones mecánicas.
Para usar la caja de cambios, los diminutos robots deben construirse de manera que puedan aprovecharlos. Por ejemplo, al combinar componentes elásticos con enlaces mecánicos, la energía similar a un resorte puede acumular presión y luego liberarla toda a la vez. Los enlaces mecánicos sirven para mantener los componentes elásticos en su lugar hasta que llega el momento de liberar la energía.
Para probar su idea, los investigadores construyeron estructuras en forma de caja con partes de pared elásticas que fueron comprimidas lentamente por la caja de engranajes cuando se expuso a un campo magnético. Un enlace mecánico mantuvo las paredes en su lugar para permitir que se acumulara la presión. Cuando se alcanzó cierta cantidad de presión, las paredes se liberaron, empujando al robot en la dirección deseada. Para crear un robot, se engancharon varias de las estructuras en forma de caja. Usando este enfoque, los investigadores pudieron crear robots tipo cabrestante capaces de levantar hasta 103 gramos, o puentes que alcanzaron los 119 milímetros. También crearon orugas y abrazaderas.
© 2022 Red Ciencia X Observe pequeños robots electromecánicos que son más rápidos que los guepardos para su tamaño