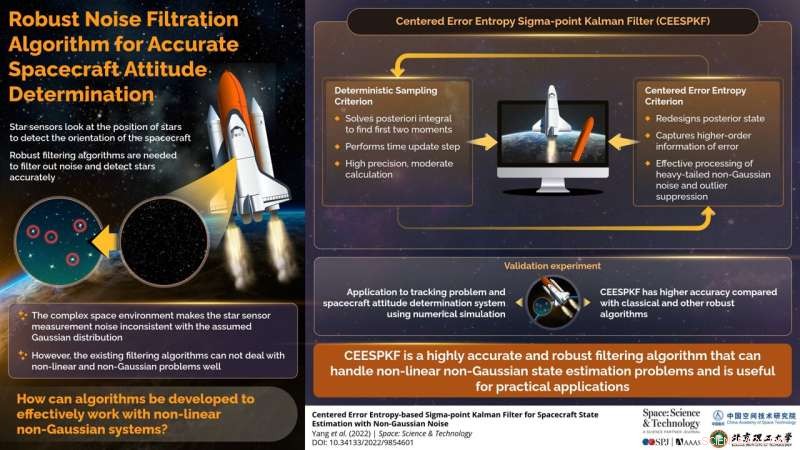
Infografía para el filtro kalman de punto sigma basado en la entropía de error centrado para la estimación del estado de la nave espacial con ruido no gaussiano. Crédito:Espacio:ciencia y tecnología
Un modelo de cinemática de actitud de nave espacial, un modelo de medición de actitud y un algoritmo de filtro son tres partes importantes en la determinación de actitud de nave espacial, y un algoritmo de filtrado de alta precisión es la clave para la determinación de actitud. El filtro de Kalman de punto sigma clásico (SPKF) se usa ampliamente en el área de estimación del estado de una nave espacial con la hipótesis del ruido blanco gaussiano.
Aunque el algoritmo SPKF funciona bien en ruido blanco gaussiano ideal, las condiciones operativas reales de la nave espacial en órbita son complicadas. La interferencia ambiental espacial, la fluctuación del panel solar y el ruido de parpadeo harán que el ruido ya no cumpla con la distribución gaussiana y presente una situación no gaussiana de cola pesada, donde el método de filtrado SPKF clásico ya no es aplicable y habrá una degradación obvia de la precisión. o incluso filtrar la divergencia.
En un artículo de investigación publicado recientemente en Space:Science &Technology , un equipo conjunto de la Universidad de Ingeniería del Ejército de PLA y la Academia China de Ciencias Militares, propuso un algoritmo sólido de filtro de Kalman sin perfume de entropía de error centrado (CEEUKF) mediante la combinación del criterio de muestreo determinista con el criterio de entropía de error centrado.
En primer lugar, el autor introdujo el algoritmo SPKF clásico y el criterio CEE. El filtro de Kalman (KF) es el filtro óptimo con el marco gaussiano lineal. Sin embargo, los sistemas reales suelen ser sistemas no lineales y no existe un algoritmo de filtrado óptimo para los sistemas no lineales. Solo se pueden usar métodos aproximados para los sistemas gaussianos no lineales.
El algoritmo de filtrado no lineal basado en el criterio de muestreo determinista tiene mayor precisión que la linealización de la función no lineal. Los métodos de filtrado gaussiano no lineal de muestreo determinista clásico son el filtro de Kalman sin perfume (UKF), el filtro de Kalman de cubetura (CKF) y el filtro de Kalman diferencial central (CDKF). Dado que estos métodos involucran el muestreo de puntos deterministas, el autor los llamó métodos SPKF.
Además, se utilizó el método UT típico y se revisa el UKF. UKF clásico usó el método UT para obtener puntos de muestreo y aproximar la media estatal y la covarianza de error de una función de densidad de probabilidad (PDF). El método UKF fue más fácil de aproximar PDF que una función no lineal. El paso de actualización de tiempo y el paso de actualización de medición estaban contenidos en él.
Luego, el autor tomó la combinación ponderada de la correntropía máxima (MC) y la entropía de error mínimo (MEE) como la expresión de CEE, que se había verificado como más sólida que los criterios MEE y MC.
Luego, el autor derivó el UKF basado en la entropía del error centrado (CEUKF) mediante el criterio CEE y se comprometió a extender este algoritmo a campos no lineales y no gaussianos. El CEEUKF contenía pasos de actualización de tiempo y medición. Para el sistema no lineal, la actualización de tiempo del algoritmo CEEUKF fue la misma que la del algoritmo UKF clásico, donde se utilizaron los métodos de muestreo de punto sigma para realizar el paso de actualización de tiempo.
El nuevo paso de actualización de la medición se diseñó en base a dos trabajos principales. Uno es el establecimiento del modelo aumentado y el otro es la estimación posterior del estado por el criterio CEE. Debido a que la información de orden superior del error fue capturada por el criterio CEE, los CEESPKF deberían ser más robustos para lidiar con el ruido no gaussiano que CEEKF.
Posteriormente, la aplicación al sistema de determinación de actitud de naves espaciales verificó la teoría del autor. El autor introdujo por primera vez el modelo giroscópico, el modelo de sistema de determinación de actitud y el modelo de medición. Luego, el UKF clásico, el filtro de Kalman sin perfume de máxima correntropía (MCUKF) y el filtro de Kalman sin perfume de mínima entropía de error (MEEUKF) y el CEEUKF propuesto se utilizaron para realizar la simulación.
En ruido gaussiano, la precisión de filtrado de CEEUKF y MCUKF fue cercana a la del método UKF clásico. La precisión de filtrado de MEEUKF fue pobre debido a su inestabilidad. En ruido no gaussiano, el algoritmo CEEUKF propuesto tuvo la mayor precisión de filtrado que el UKF clásico y otros algoritmos robustos.
Además, el CEEUKF también tuvo la tasa de convergencia más rápida. Los resultados de filtrado del UKF tradicional tuvieron la precisión de filtrado más baja y se produjeron algunos errores estimados importantes en diferentes momentos. El MCUKF tuvo un mejor efecto de filtrado que el UKF tradicional, pero fue más pobre que el CEEUKF propuesto. En conclusión, en comparación con los algoritmos existentes, CEEUKF mostró su excelente rendimiento bajo la elección adecuada de los anchos de banda del núcleo en la simulación del sistema de estimación de actitud de la nave espacial. Un novedoso filtro de Kalman para el seguimiento de objetivos en el espacio