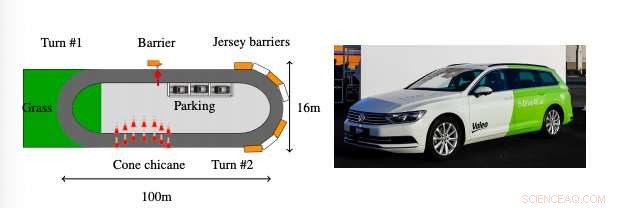
Pista de prueba (izquierda) y coche de demostración usado (derecha). Crédito:Wirbel et al.
Investigadores de Valeo, una empresa tecnológica especializada en innovación automotriz, recientemente han desarrollado un sistema de aprendizaje de imitación de extremo a extremo para el control de la velocidad del automóvil. Su enfoque descrito en un artículo publicado previamente en arXiv, utiliza una red neuronal con memoria a corto plazo (LSTM), un tipo de red neuronal recurrente (RNN) que puede aprender las dependencias a largo plazo.
"Valeo es el líder mundial en sensores, los oídos y los ojos de los coches autónomos, y ya ha logrado varias primicias mundiales, como la reciente experimentación con nuestro vehículo Valeo Drive4U, el primer coche autónomo que se demostró en las calles de París, "Emilie Wirbel, uno de los investigadores que realizó el estudio, dijo a TechXplore. "Mi equipo y yo trabajamos en uno de los 56 centros de investigación y desarrollo de la empresa, investigando cómo se puede utilizar el aprendizaje profundo para lograr una mejor decisión y control de los automóviles autónomos. El objetivo de esta investigación fue demostrar que es posible manejar situaciones complejas que se pueden encontrar en entornos urbanos utilizando solo cámaras y aprendiendo de lo que puede hacer un conductor humano ".
El nuevo sistema desarrollado por Wirbel y sus colegas emplea una red neuronal artificial (ANN) que se basa en técnicas de aprendizaje profundo. La red se alimenta de demostraciones de un ser humano que opera un automóvil que se toman desde una cámara frontal y, por lo tanto, se parecen mucho a lo que la persona estaba viendo mientras conducía.
Luego, la red neuronal se entrena para imitar las acciones del conductor, centrándose especialmente en reproducir la velocidad actual del coche. Por ejemplo, cuando una imagen de entrada contiene un panel de límite de velocidad de 50 km / h, la red asegura que el coche no vaya a más de 50 km / h.
"Cuando hay otro coche delante de nosotros, un conductor humano reducirá la velocidad en consecuencia y la red debería aprender a hacer lo mismo, "Explicó Wirbel." Nuestro enfoque intenta replicar cómo un humano aprende y conduce. La red solo recibe información de la cámara frontal y no necesita percepción explícita, por ejemplo, relacionados con los semáforos o los carriles, al igual que un conductor humano no tiene un modelo explícito de dónde están exactamente las líneas y cuál es su forma ".
Después de entrenar su red neuronal, Wirbel y sus colegas lo probaron en un entorno de simulación y luego lo integraron dentro de un automóvil real, evaluar su desempeño en una pista de pruebas desafiante. Descubrieron que su sistema reaccionaba eficazmente a situaciones complejas, controlar la velocidad del automóvil cuando sea necesario (por ejemplo, reducir la velocidad en los conos de tráfico y las curvas cerradas, detenerse en las barreras y al acercarse a las señales de advertencia, etc.).
"Nuestro estudio demuestra que las situaciones complejas, como zonas de trabajo, obstáculos inesperados, etc., puede tratarse simplemente observando lo que haría un ser humano y luego reproduciéndolo de una manera nueva, situaciones similares, ", Dijo Wirbel." Esto significa que mientras tengamos suficientes datos de demostración, podemos manejar casos de uso con los que los conductores humanos se ocuparían razonablemente. Esto podría usarse en situaciones de interacción complejas en combinación con los enfoques más clásicos, para que el vehículo pueda reaccionar de forma coherente e inteligente ".
El sistema ideado por Wirbel y sus colegas ha logrado resultados muy prometedores y pronto podría aplicarse a vehículos autónomos. conduciendo a un control de velocidad más efectivo y una conducción más intuitiva. Los investigadores planean extender su prueba de concepto a situaciones más complejas, enseñar a su sistema a manejar una variedad más amplia de interacciones con otros vehículos en la carretera, además de añadir maniobras más complejas, como cambiar de carril, girando en las intersecciones, o navegar por las rotondas.
"También nos gustaría trabajar en la explicabilidad del sistema y la compatibilidad con los vehículos autónomos existentes, proporcionar una explicación al usuario final de cómo la red percibe su entorno y por qué toma sus decisiones, ", Añadió Wirbel." La hoja de ruta de la investigación es muy amplia, por lo que asistimos y contribuimos a las principales conferencias científicas para mantenernos al día con los últimos avances en esta área. Nuestro papel como equipo de I + D es también proporcionar al resto de Valeo las claves y la experiencia adecuadas para acercar nuestras pruebas de concepto a la producción ".
© 2019 Science X Network