Crédito:3000ad, Shutterstock
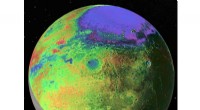
Desde el primer aterrizaje exitoso en Marte en la década de 1970, Los científicos se han esforzado por profundizar su conocimiento de la superficie del planeta rojo. El primer rover exitoso, el Sojourner, fue desplegado en la superficie de Marte en julio de 1997. Desde entonces, Ha habido otros tres rovers operados robóticamente exitosos en el planeta, recopilar información sobre el agua, rocas suelos y minerales, y la presencia de material orgánico.
Sin embargo, si el sueño de aterrizar una misión humana en Marte alguna vez se hace realidad, entonces la tecnología de los rover tendrá que avanzar a pasos agigantados. Hasta la fecha, Los rovers han carecido de las capacidades necesarias para avanzar en la exploración y respaldar la presencia humana en Marte. Para uno, no tienen autonomía. Incapaz de evaluar los riesgos circundantes, tienen que esperar a que se envíen comandos desde la Tierra. También pueden viajar solo unas pocas decenas de metros en un sol (día solar marciano) y seguir caminos predeterminados. sitios potencialmente perdidos con información valiosa.
Los científicos que trabajan en el proyecto PERASPERA, financiado con fondos europeos, asumieron el desafío de crear rovers que puedan cubrir distancias mayores en un día. tomar sus propias decisiones y trabajar con otros rovers para acceder a sitios difíciles. Coordinado por la Agencia Espacial Europea (ESA), El proyecto llevó a cabo recientemente la prueba de campo de rover más grande de Europa en la que participaron 40 ingenieros. El juicio tuvo lugar en el extremo norte del desierto del Sahara en Marruecos, donde se dice que el terreno se parece al de Marte.
Del laboratorio al campo
Se probaron tres vehículos autónomos, Mana Minnie y SherpaTT, durante 2 semanas para ver si funcionarían bien en un entorno similar a Marte. Los sistemas de navegación automatizados desarrollados se probaron en hasta cinco sitios diferentes. "Las pruebas de laboratorio del hardware que diseñamos no tienen en cuenta la variabilidad que aporta la naturaleza, desde la luz del cielo hasta la forma del paisaje, la textura y los colores de la arena y la roca. Operar al aire libre de esta manera demuestra que nuestros sistemas funcionan en entornos mucho más complejos y elaborados de lo que se puede simular jamás ", explicó el jefe de la Sección de Automatización y Robótica de la ESA, Gianfranco Visentin, en un artículo publicado en 'Phys.org'.
Los rovers del mañana
Uno de los rovers el SherpaTT, recorrió 1,3 km de forma totalmente autónoma. De hecho, después de ver algunas piedras de formas inusuales, le indicó al planificador principal que se posicionara mejor para poder capturar más imágenes. Las capacidades autónomas de navegación y toma de decisiones de largo alcance demostradas por el rover son vitales para la futura exploración de Marte. "No habrá escuelas de analistas para escudriñar cada imagen; se necesitarán sistemas móviles inteligentes para detectar lo que es interesante y enviarlo de regreso a la Tierra". ", Agregó Visentin. Los datos recopilados por los rovers se compararon con un mapa de la ubicación creado por un dron antes de la prueba de campo.
PERASPERA (PERASPERA (AD ASTRA) Plan de actividades y hoja de ruta europea para la explotación espacial de la robótica y la autonomía) finaliza en 2019. Los logros del proyecto incluyen tecnologías clave y sistemas robóticos para el mantenimiento de satélites en órbita y la exploración planetaria. Los resultados del proyecto se utilizarán para respaldar una misión espacial de robótica orbital planificada para 2023.